锂电池涂布在线测量中的线阵相机标定方法  下载: 1116次
下载: 1116次
Calibration of Linear Camera for Online Measurement of Lithium Battery Coating
武汉科技大学冶金装备及其控制教育部重点实验室, 湖北 武汉 430081
图 & 表
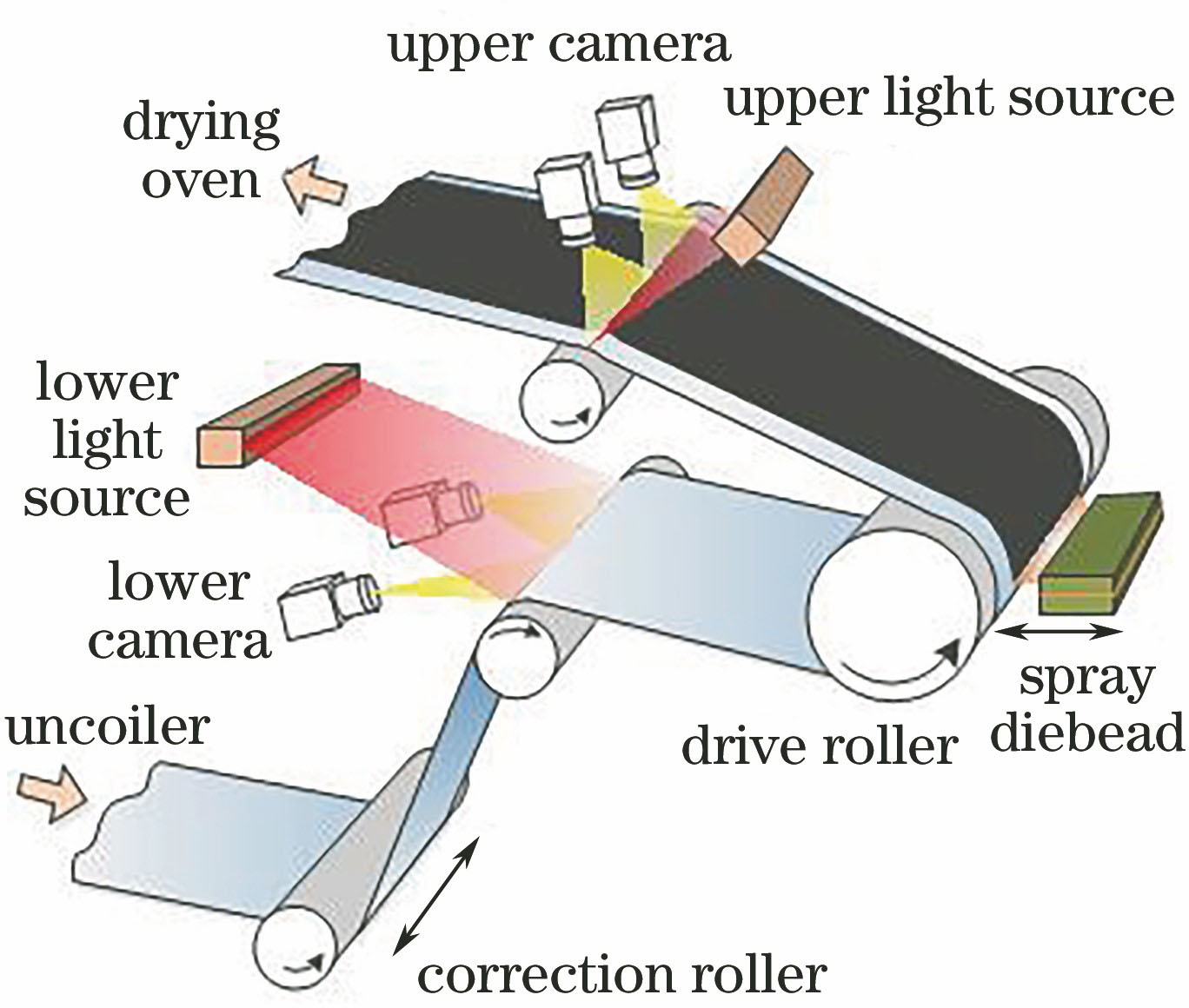
图 1. 1出4涂布在线检测方案示意图
Fig. 1. Schematic of coating online inspection scheme
下载图片 查看原文
图 2. 涂布检测模型图
Fig. 2. Diagram of coating inspection model
下载图片 查看原文
图 3. 相机成像分布示意图
Fig. 3. Diagram of camera imaging distribution
下载图片 查看原文
图 4. 相机单维度成像模型图
Fig. 4. Diagram of camera single-dimensional imaging model
下载图片 查看原文
图 5. 标定图像。(a)左相机标定点;(b)右相机标定点
Fig. 5. Image calibration. (a) Left camera calibration point; (b) right camera calibration point
下载图片 查看原文
图 6. LM训练曲线图
Fig. 6. LM training curves
下载图片 查看原文
图 7. 标定误差对比曲线
Fig. 7. Contrast of calibration errors
下载图片 查看原文
图 8. 现场应用情况
Fig. 8. Field applications
下载图片 查看原文
表 1相机标定结果
Table1. Camera calibration results
| Calibration parameter | Left camera | Right camera |
|---|
| gx | 20.3687 | 20.3627 | | tx | 1970.5537 | 101.457 | | Tx | -104.3465 | -196.16979 | | Calibration error | 0.6428 | 1.4497 |
|
查看原文
表 2相机校正结果
Table2. Camera calibration results
| Calibration parameter | Left camera | Right camera |
|---|
| k1 | -2.0786×10-10 | -4.2328×10-11 | | k2 | 2.9220×10-17 | 1.5027×10-18 | | u0 | 5181.8 | 6302 | | Coordinate errorafter correction | 0.1794 | 0.3985 |
|
查看原文
表 3特征点u方向坐标
Table3. Characteristic point u-direction coordinates
| Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
|---|
| Xw /mm | 0 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 110 | 120 | 130 | 140 | | u /pixel | 10 | 242 | 474 | 706 | 938 | 1170 | 1403 | 1636 | 1868 | 2103 | 2337 | 2570 | 2804 | 3038 | 3272 | | Number | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | | | Xw /mm | 150 | 160 | 170 | 180 | 190 | 200 | 210 | 220 | 230 | 240 | 250 | 260 | 270 | 280 | | | u /pixel | 3507 | 3741 | 3977 | 4211 | 4447 | 4681 | 4917 | 5152 | 5388 | 5623 | 5859 | 6094 | 6330 | 6566 | |
|
查看原文
表 4现场测试数据
Table4. Field test datamm
| Section No. | Item | B1 | B2 | B3 | B4 | B5 | B6 | B7 |
|---|
| 1 | Actual value | 15.036 | 172.358 | 28.742 | 172.768 | 30.197 | 171.92 | 15.154 | | Measurement error | 0.038 | 0.087 | -0.078 | 0.001 | -0.048 | -0.068 | 0.019 | | 2 | Actual value | 15.088 | 172.317 | 28.799 | 172.727 | 30.241 | 171.88 | 15.115 | | Measurement error | 0.035 | 0.072 | -0.031 | -0.059 | -0.043 | -0.028 | 0.009 | | 3 | Actual value | 15.017 | 172.427 | 28.672 | 172.832 | 30.148 | 171.98 | 15.1 | | Measurement error | 0.057 | 0.018 | -0.057 | -0.063 | 0.001 | -0.079 | 0.073 | | 4 | Actual value | 15.076 | 172.322 | 28.775 | 172.727 | 30.241 | 171.9 | 15.162 | | Measurement error | -0.002 | -0.075 | -0.061 | -0.007 | -0.043 | -0.048 | 0.011 |
|
查看原文
刘怀广, 王迪, 杨金堂, 刘源泂. 锂电池涂布在线测量中的线阵相机标定方法[J]. 激光与光电子学进展, 2019, 56(11): 111501. Huaiguang Liu, Di Wang, Jintang Yang, Yuanjiong Liu. Calibration of Linear Camera for Online Measurement of Lithium Battery Coating[J]. Laser & Optoelectronics Progress, 2019, 56(11): 111501.










 PDF全文
PDF全文

