基于多层深度卷积特征的抗遮挡实时跟踪算法  下载: 1184次
下载: 1184次
Real-Time and Anti-Occlusion Visual Tracking Algorithm Based on Multi-Layer Deep Convolutional Features
1 中国科学院国家空间科学中心复杂航天系统电子信息技术重点实验室, 北京 100190
2 中国科学院大学, 北京 100049
图 & 表
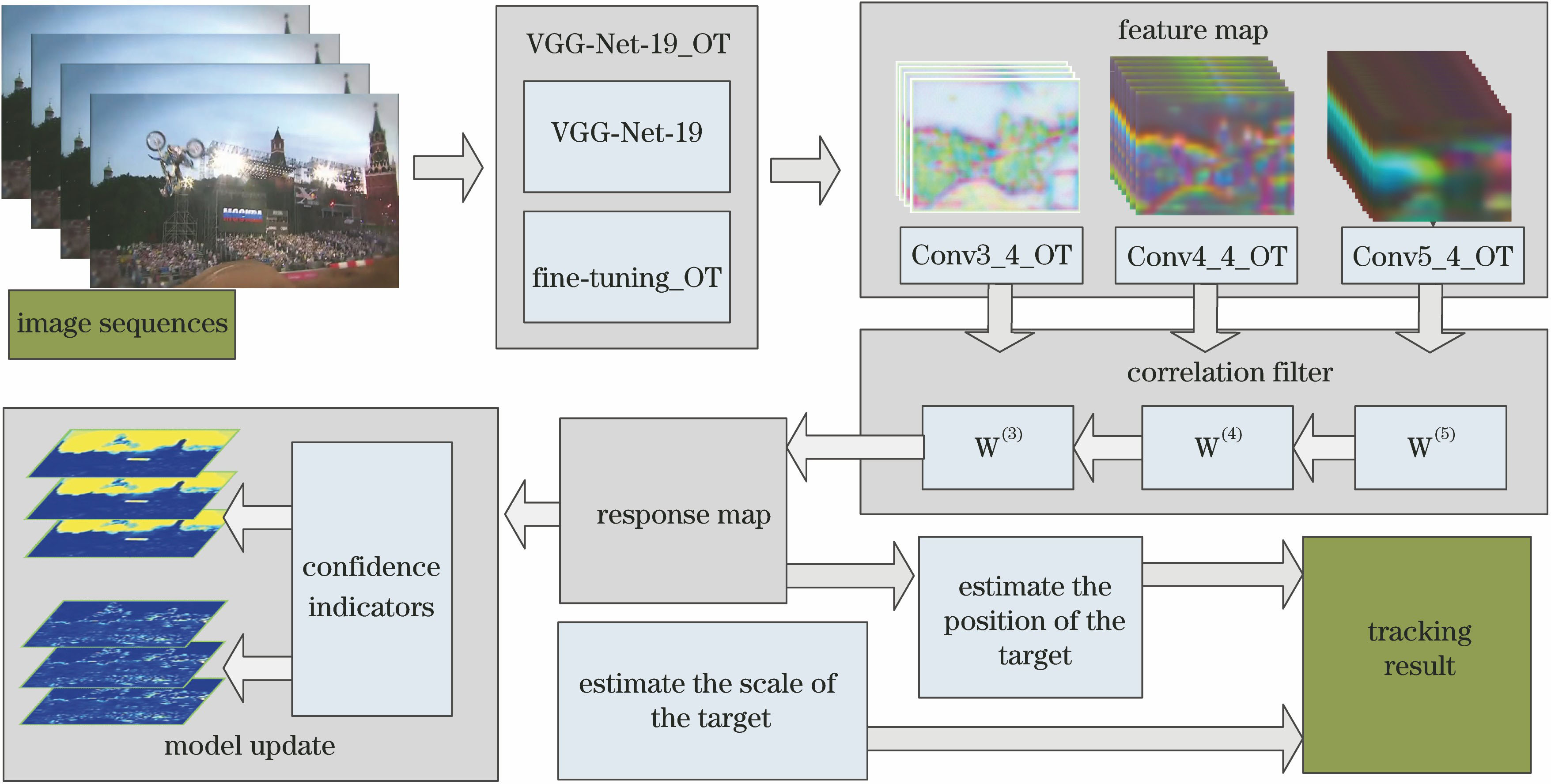
图 1. 目标跟踪算法框架图
Fig. 1. Framework of the proposed visual tracking algorithm
下载图片 查看原文
图 2. VGG-Net-19_OT网络结构图
Fig. 2. Network structure of VGG-Net-19_OT
下载图片 查看原文
图 3. Flow chart of algorithm
Fig. 3.
下载图片 查看原文
图 4. 10个跟踪算法在不同视频序列上的定性结果显示。(a) Ironman 1; (b) Ironman 2; (c) Doll; (d) MotorRolling; (e) Bolt2; (f) Skiing
Fig. 4. Qualitative results of the 10 tracking algorithms on different video sequences. (a) Ironman 1; (b) Ironman 2; (c) Doll; (d) MotorRolling; (e) Bolt2; (f) Skiing
下载图片 查看原文
图 5. 10个跟踪算法在部分遮挡视频序列上的定性结果显示。(a) Jogging-1; (b) Walking2; (c) Coke; (d) Soccer
Fig. 5. Qualitative results of the 10 tracking algorithms on different occluded video sequences. (a) Jogging-1; (b) Walking2; (c) Coke; (d) Soccer
下载图片 查看原文
图 6. 基于OTB-2015评估基准OPE的跟踪算法。(a)精度曲线图;(b)成功率曲线图
Fig. 6. Algorithm of OPE on OTB-2015. (a) Precision plot; (b) overlap success plot
下载图片 查看原文
图 7. 基于UAV123评估基准OPE的跟踪算法。(a)精度曲线图;(b)成功率曲线图
Fig. 7. Algorithm of OPE on UAV123. (a) Precision plot; (b) overlap success plot
下载图片 查看原文
图 8. OTB-2015 11种不同属性视频序列跟踪精度曲线
Fig. 8. Precision plots on 11 different attributes video sequences of OTB-2015
下载图片 查看原文
图 9. OTB-2015 11种不同属性视频序列跟踪成功率曲线
Fig. 9. Success plots on 11 different attributes video sequences of OTB-2015
下载图片 查看原文
表 1VGG-Net-19的各层参数
Table1. Parameters of VGG-Net-19
| Structure | Filter | Output size /(pixel×pixel×pixel) | Memory /bit | Parameter |
|---|
| Image input | | 224×224×3 | 224×224×3=150528 | 0 | | Conv1_1Conv1_2 | 6464 | 224×224×64224×224×64 | 224×224×64=3211264224×224×64=3211264 | 3×3×3×64=17283×3×64×64=36864 | | POOL1 | | 112×112×64 | 112×112×64=802816 | 0 | | Conv2_1Conv2_2 | 128128 | 112×112×128112×112×128 | 112×112×128=1605632112×112×128=1605632 | 3×3×64×128=737283×3×128×128=147456 | | POOL2 | | 56×56×128 | 56×56×128=401408 | 0 | | Conv3_1Conv3_2Conv3_3Conv3_4 | 256256256256 | 56×56×25656×56×25656×56×25656×56×256 | 56×56×256=80281656×56×256=80281656×56×256=80281656×56×256=802816 | 3×3×128×256=2949123×3×256×256=5898243×3×256×256=5898243×3×256×256=589824 | | POOL3 | | 28×28×256 | 28×28×256=200704 | 0 | | Conv4_1Conv4_2Conv4_3Conv4_4 | 512512512512 | 28×28×51228×28×51228×28×51228×28×512 | 28×28×512=40140828×28×512=40140828×28×512=40140828×28×512=401408 | 3×3×256×512=11796483×3×512×512=23592963×3×512×512=23592963×3×512×512=2359296 | | POOL4 | | 14×14×512 | 14×14×512=100352 | 0 | | Conv5_1Conv5_2Conv5_3Conv5_4 | 512512512512 | 14×14×51214×14×51214×14×51214×14×512 | 14×14×512=10035214×14×512=10035214×14×512=10035214×14×512=100352 | 3×3×512×512=23592963×3×512×512=23592963×3×512×512=23592963×3×512×512=2359296 | | POOL5 | | 7×7×512 | 7×7×512=25088 | 0 | | FC6 | 4096 | 1×1×4096 | 1×1×4096=4096 | 7×7×512×4096=102760448 | | FC7 | 4096 | 1×1×4096 | 1×1×4096=4096 | 4096×4096=16777216 | | FC8 | 1000 | 1×1×1000 | 1×1×1000=1000 | 4096×1000=4096000 |
|
查看原文
表 2OTB-2015视频属性
Table2. Video attributes of OTB-2015
| Video attribute | Value | Video attribute | Value |
|---|
| Background clutters (BC) | 31 | Motion blur (MB) | 29 | | Deformation | 44 | Occlusion | 49 | | Fast motion (FM) | 39 | Out-of-plane rotation (OPR) | 63 | | Illumination variation (IV) | 38 | Out-of-view (OV) | 14 | | In-plane rotation (IPR) | 51 | Scale variation (SV) | 64 | | Low resolution (LR) | 9 | | |
|
查看原文
表 3UAV123视频属性
Table3. Video attributes of UAV123
| Video attribute | Value | Video attribute | Value |
|---|
| Scale variation (SV) | 109 | Out of view (OV) | 30 | | Aspect ratio change (ARC) | 68 | Background clutter (BC) | 21 | | Low resolution (LR) | 48 | Illumination variation (IV) | 31 | | Fast motion (FM) | 28 | Viewpoint change (VC) | 60 | | Full occlusion (FOC) | 33 | Camera motion (CM) | 70 | | Partial occlusion (POC) | 73 | Similar object (SOB) | 39 |
|
查看原文
表 4UAV123 12种不同属性视频序列跟踪精度与跟踪成功率
Table4. Precision values and success rates on 12 different attributes video sequences of UAV123
| Sequence | Proposed algorithm | KCF | HCFTstar |
|---|
| Precision value | Success rate | | Precision value | Success rate | | Precision value | Success rate |
|---|
| Aspect ratio change (ARC) | 0.619 | 0.464 | 0.447 | 0.292 | 0.610 | 0.434 | | Background clutter (BC) | 0.585 | 0.447 | 0.536 | 0.413 | 0.584 | 0.470 | | Camera motion (CM) | 0.677 | 0.556 | 0.502 | 0.366 | 0.682 | 0.543 | | Fast motion (FM) | 0.544 | 0.402 | 0.301 | 0.200 | 0.516 | 0.377 | | Full occlusion (FOC) | 0.567 | 0.358 | 0.420 | 0.243 | 0.561 | 0.381 | | Illumination variation (IV) | 0.627 | 0.506 | 0.464 | 0.334 | 0.614 | 0.451 | | Low resolution (LR) | 0.555 | 0.333 | 0.435 | 0.251 | 0.579 | 0.346 | | Out of view (OV) | 0.609 | 0.500 | 0.406 | 0.277 | 0.603 | 0.467 | | Partial occlusion (POC) | 0.632 | 0.499 | 0.497 | 0.365 | 0.628 | 0.491 | | Scale variation (SV) | 0.644 | 0.534 | 0.497 | 0.339 | 0.646 | 0.498 | | Similar object (SOB) | 0.691 | 0.566 | 0.616 | 0.418 | 0.693 | 0.552 | | Viewpoint change (VC) | 0.637 | 0.494 | 0.450 | 0.302 | 0.625 | 0.440 |
|
查看原文
表 5跟踪速率
Table5. Tracking speedsframe /s
| Sequence | Basketball | FaceOcc1 | Football1 | Girl | Jogging1 | Jumping | Soccer | Sylvester | Trellis |
|---|
| Speed | 31.3 | 34.5 | 26.1 | 35.9 | 28.2 | 26.1 | 25.1 | 32.6 | 27.9 |
|
查看原文
表 6基于深度学习的跟踪算法的平均跟踪速率对比
Table6. Average tracking speed comparison for the deep learning-based tracking algorithmframe /s
| Algorithm | Proposed | FCNT | MDNet | HCFT |
|---|
| Tracking speed | 29.6 | 3 | 1 | 10 |
|
查看原文
崔洲涓, 安军社, 崔天舒. 基于多层深度卷积特征的抗遮挡实时跟踪算法[J]. 光学学报, 2019, 39(7): 0715002. Zhoujuan Cui, Junshe An, Tianshu Cui. Real-Time and Anti-Occlusion Visual Tracking Algorithm Based on Multi-Layer Deep Convolutional Features[J]. Acta Optica Sinica, 2019, 39(7): 0715002.











 PDF全文
PDF全文

