激光与光电子学进展, 2020, 57 (4): 041503, 网络出版: 2020-02-20
室内移动机器人双目视觉全局定位  下载: 1499次
下载: 1499次
Global Localization for Indoor Mobile Robot Based on Binocular Vision
图 & 表
图 1. 移动机器人图像特征匹配。(a)近景匹配;(b)远景匹配
Fig. 1. Image feature matching of mobile robot. (a) Matching in near scene; (b) matching in far scene

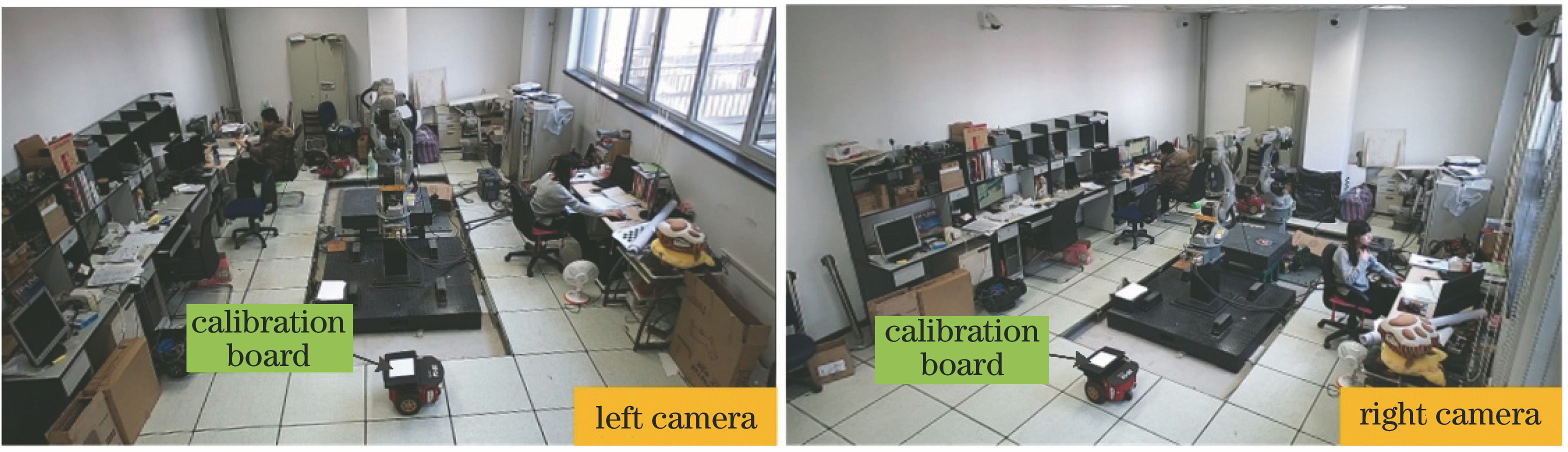
图 3. 移动机器人双目视觉全局定位原理
Fig. 3. Global localization principle of mobile robot based on binocular vision
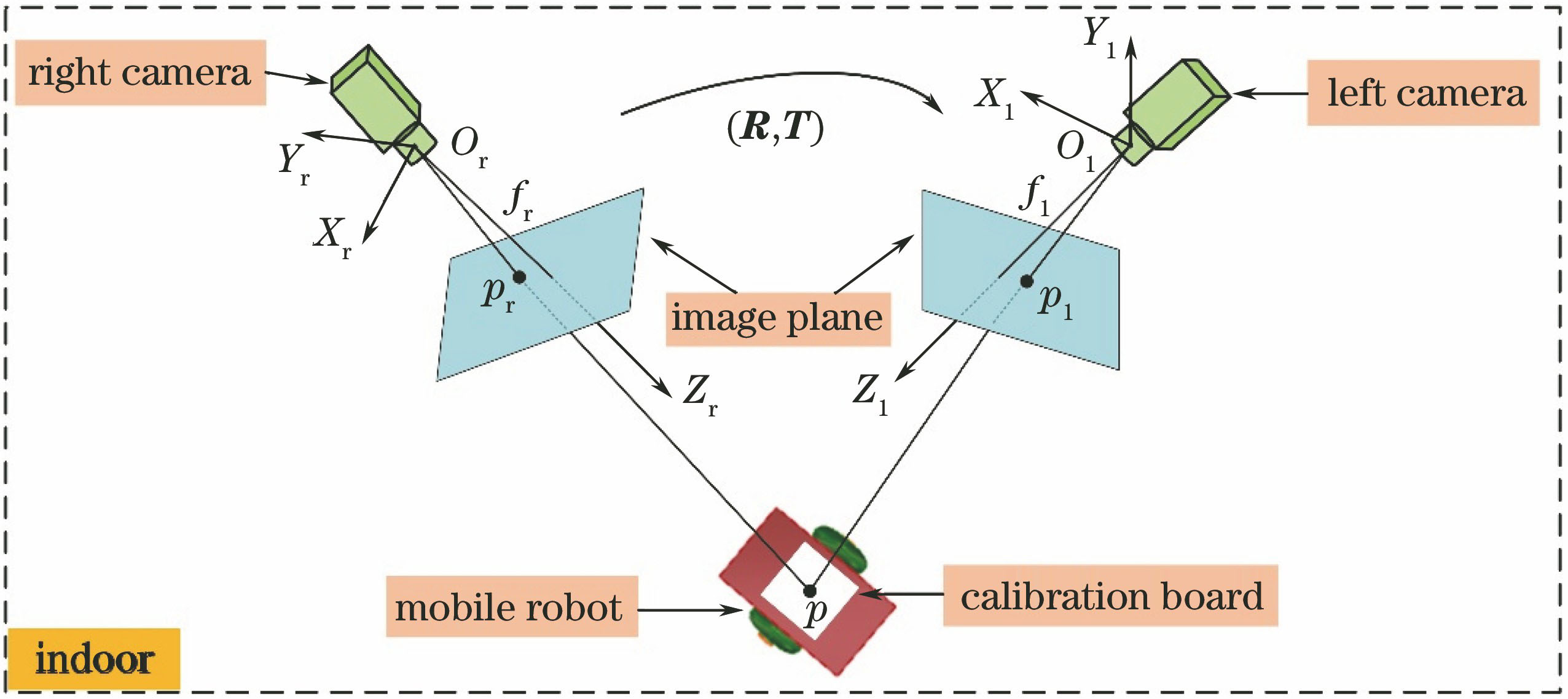
图 4. 移动机器人运动区域检测。 (a)原图;(b)基于高斯混合模型的处理结果;(c)形态学处理结果;(d)最小矩形框标注
Fig. 4. Motion area detection of mobile robot. (a) Original image; (b) processed result based on Gaussian mixture model; (c) processed result based on morphology; (d) minimum rectangle mark

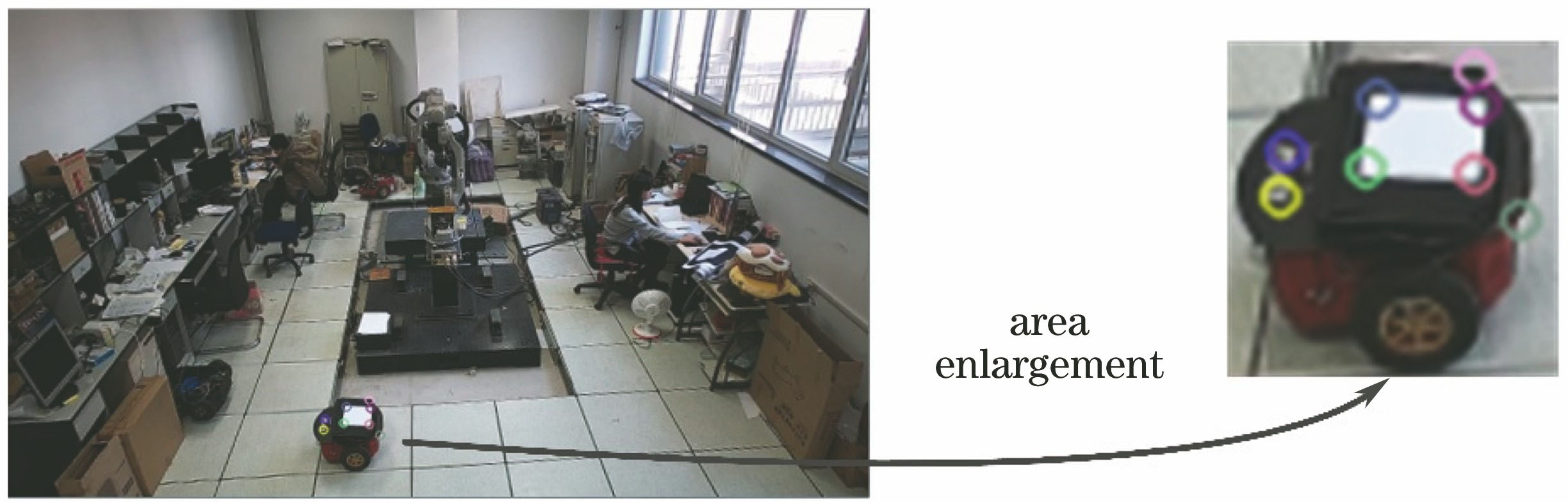
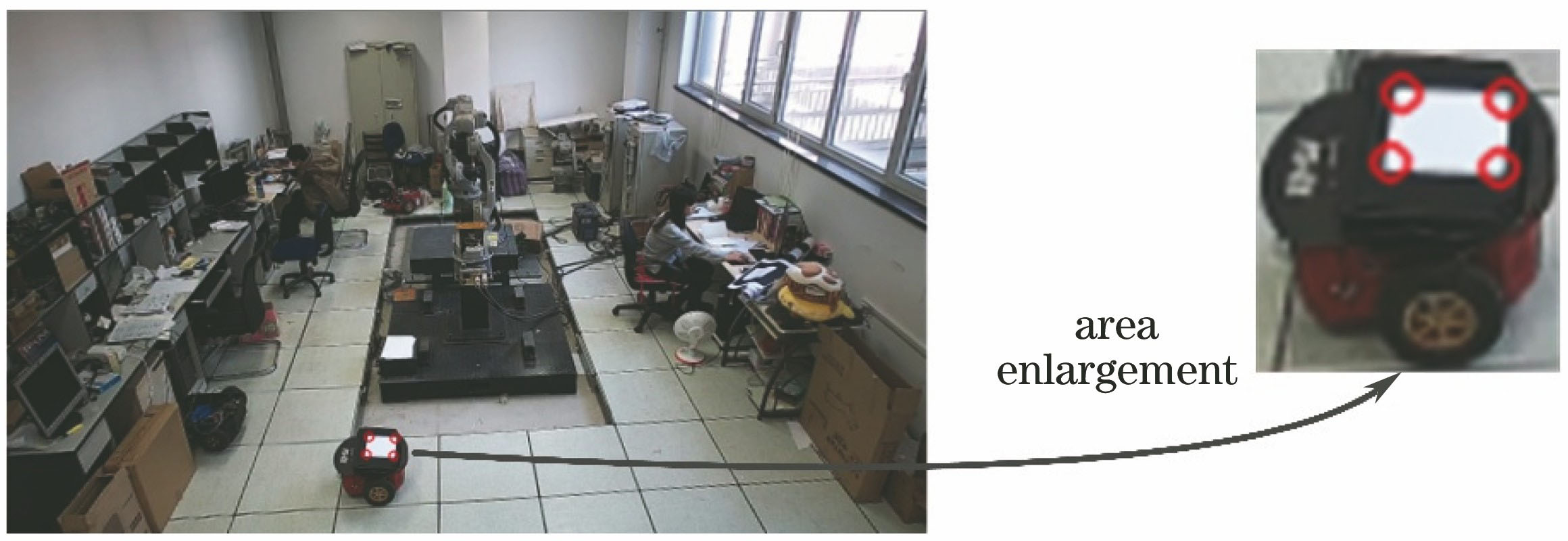
图 7. 室内移动机器人双目视觉全局定位实验平台
Fig. 7. Global localization experiment platform for indoor mobile robot based on binocular vision


图 9. 全局定位误差。 (a)第1圈定位误差;(b)第2圈定位误差
Fig. 9. Global localization error. (a) Localization error of 1st lap; (b) localization error of 2nd lap
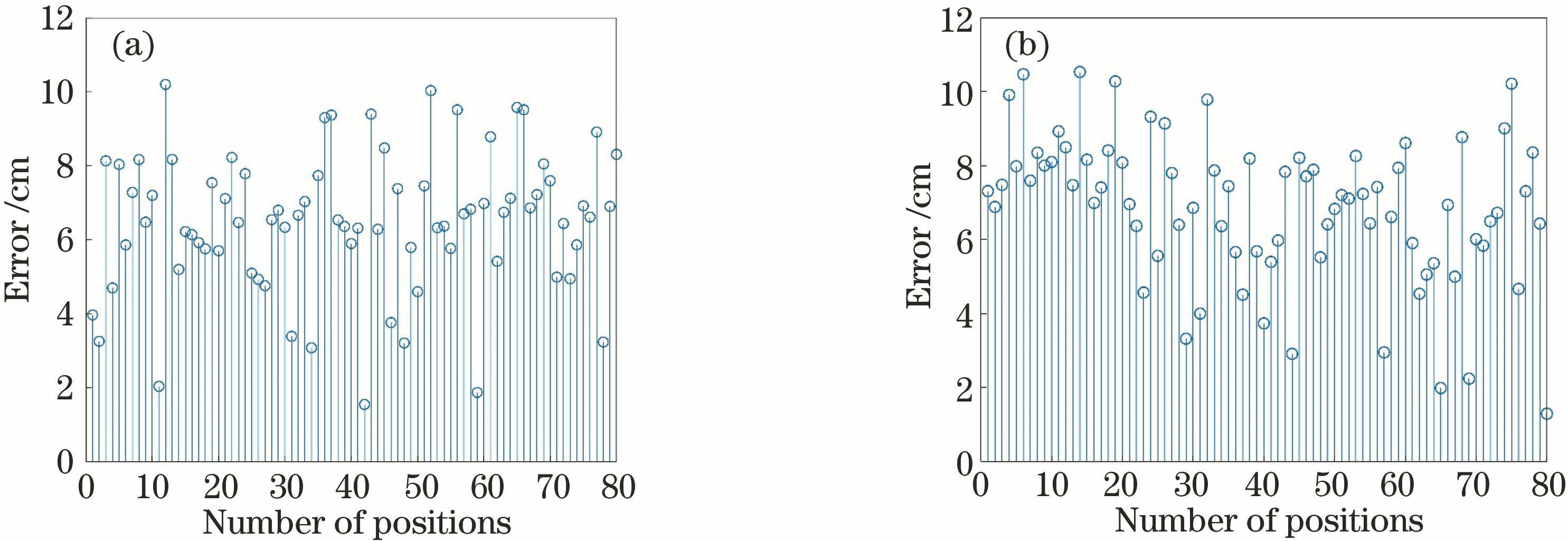
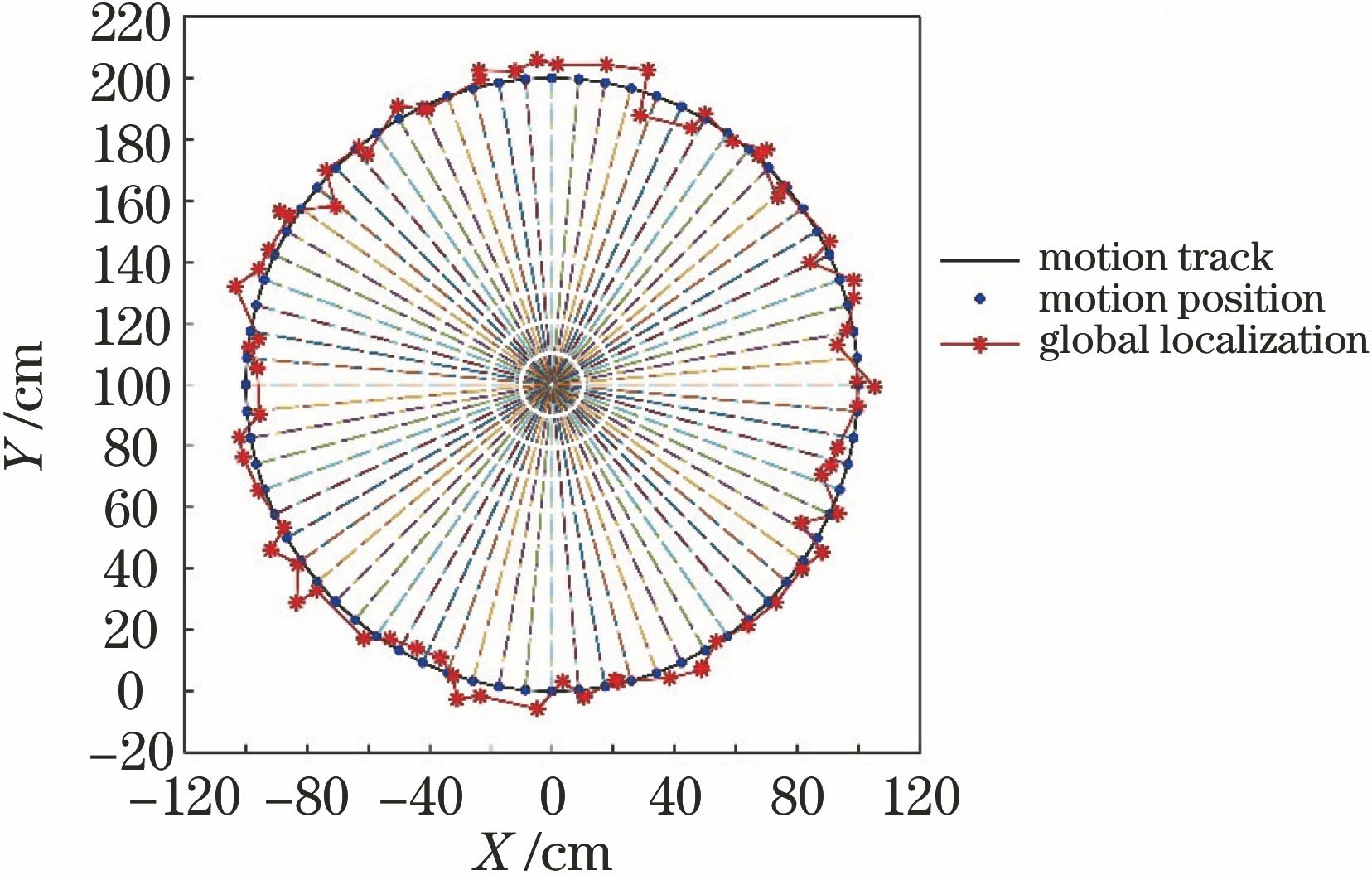
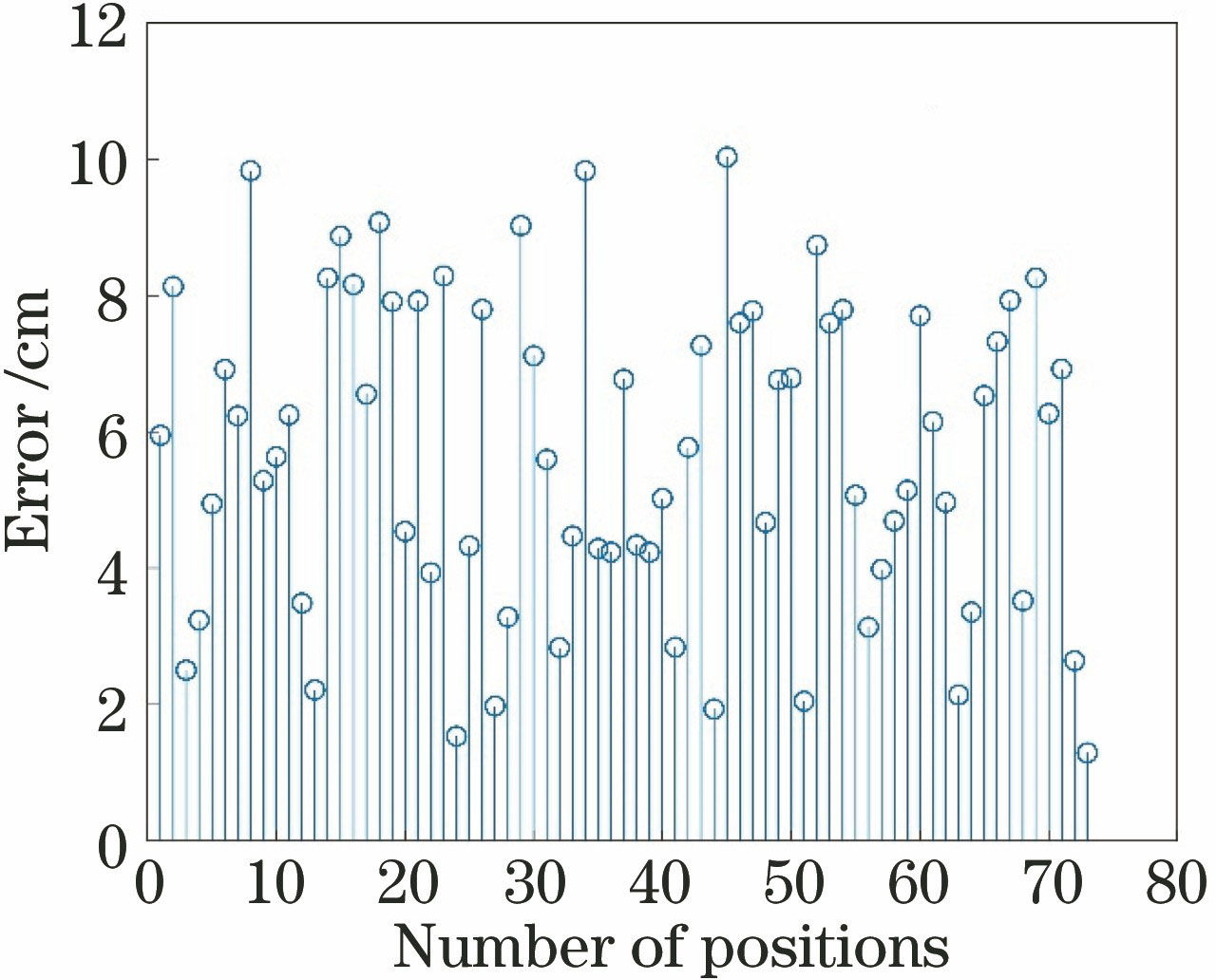
表 1相机内参数标定结果
Table1. Calibration results of camera intrinsic parameters
|
李鹏, 张洋洋. 室内移动机器人双目视觉全局定位[J]. 激光与光电子学进展, 2020, 57(4): 041503. Peng Li, Yangyang Zhang. Global Localization for Indoor Mobile Robot Based on Binocular Vision[J]. Laser & Optoelectronics Progress, 2020, 57(4): 041503.




 PDF全文
PDF全文

