中国激光, 2019, 46 (7): 0710002, 网络出版: 2019-07-11
基于深度图的三维激光雷达点云目标分割方法  下载: 2495次
下载: 2495次
Target Segmentation Method for Three-Dimensional LiDAR Point Cloud Based on Depth Image
图 & 表
图 1. 从点云到深度图的投影过程。(a)点云数据;(b)深度图;(c)场景图片
Fig. 1. Projection form point clouds to depth map. (a) Point clouds; (b) depth map; (c) scene image
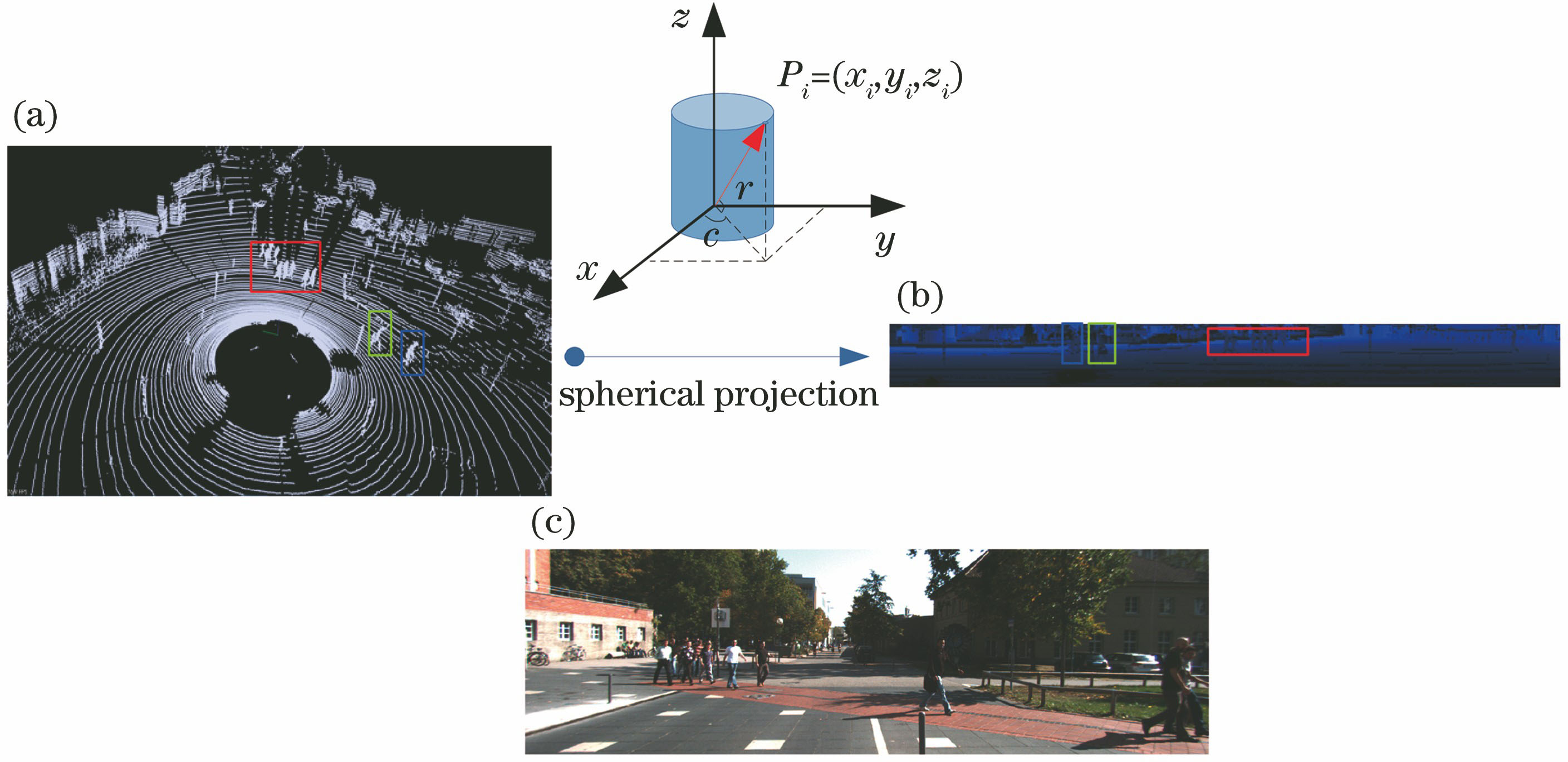
图 4. 角度距离和激光扫描目标示意图。(a)角度距离;(b)激光器扫描相邻的两个目标
Fig. 4. Angle distance and laser scanning target diagrams. (a) angle distance; (b) laser scanning two adjacent targets
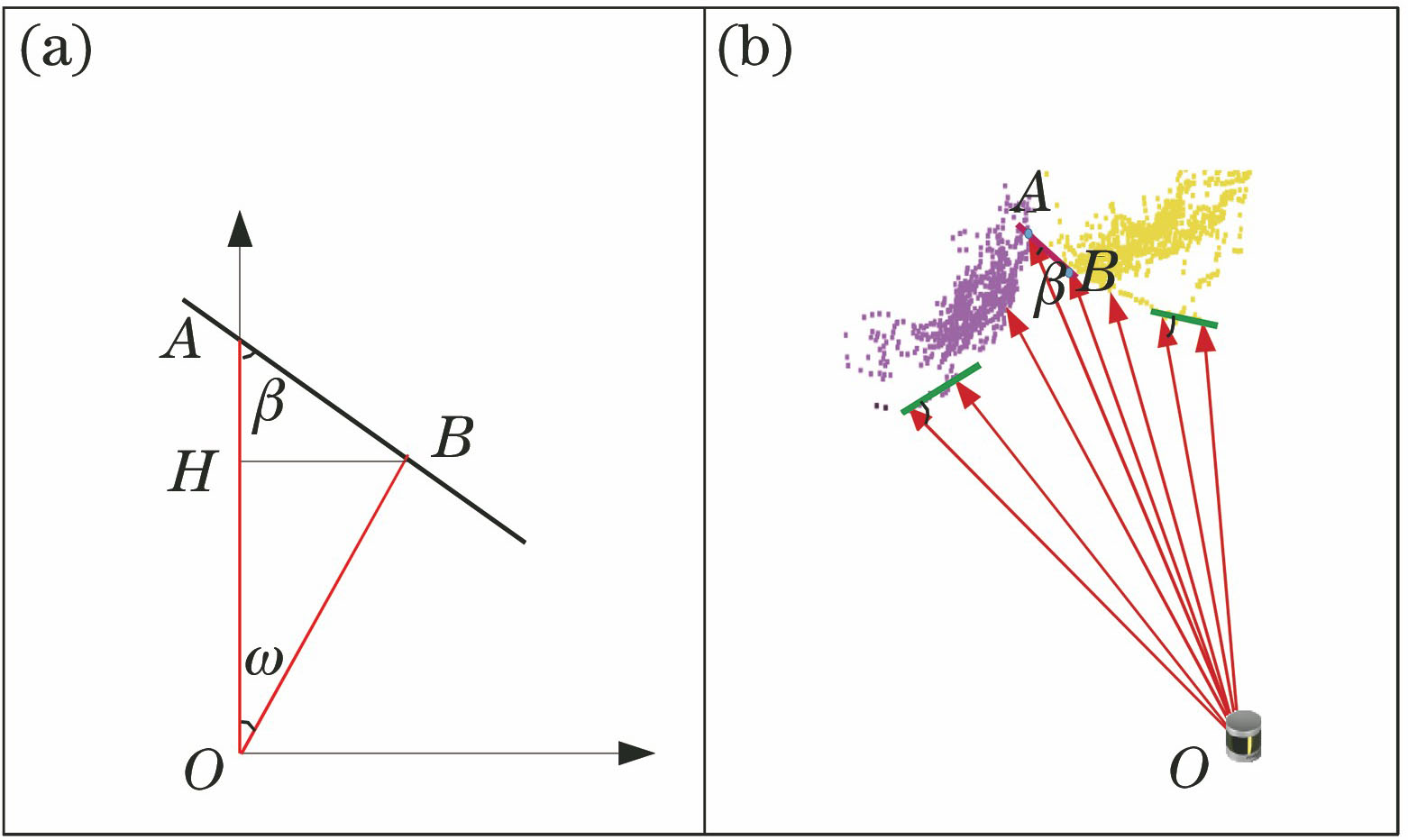
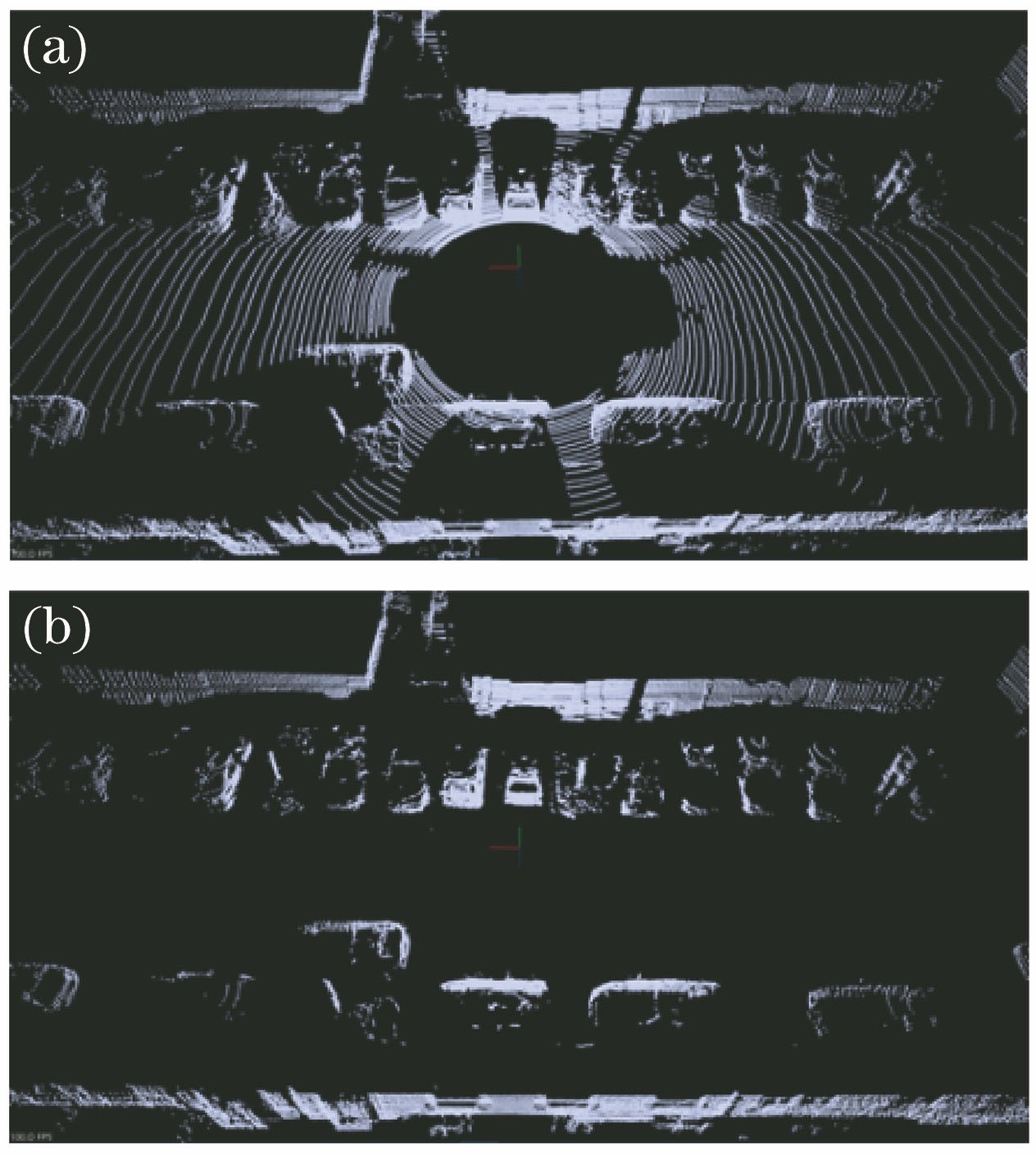
图 6. 地面点云去除结果。(a)原始点云数据;(b)去除地面点云后
Fig. 6. Ground point cloud extraction result. (a) Original point cloud data; (b) ground point cloud extraction
范小辉, 许国良, 李万林, 王茜竹, 常亮亮. 基于深度图的三维激光雷达点云目标分割方法[J]. 中国激光, 2019, 46(7): 0710002. Xiaohui Fan, Guoliang Xu, Wanlin Li, Qianzhu Wang, Liangliang Chang. Target Segmentation Method for Three-Dimensional LiDAR Point Cloud Based on Depth Image[J]. Chinese Journal of Lasers, 2019, 46(7): 0710002.



 PDF全文
PDF全文

