激光与光电子学进展, 2020, 57 (21): 211202, 网络出版: 2020-10-26
基于双目线结构光的承轨台测量  下载: 799次
下载: 799次
Measurement of Rail Bearing Platform Based on Binocular Line-Structured Light
图 & 表
图 1. 轨道板检测系统示意图。(a)侧视图;(b)俯视图
Fig. 1. Schematic of slab detection system. (a) Side view; (b) top view
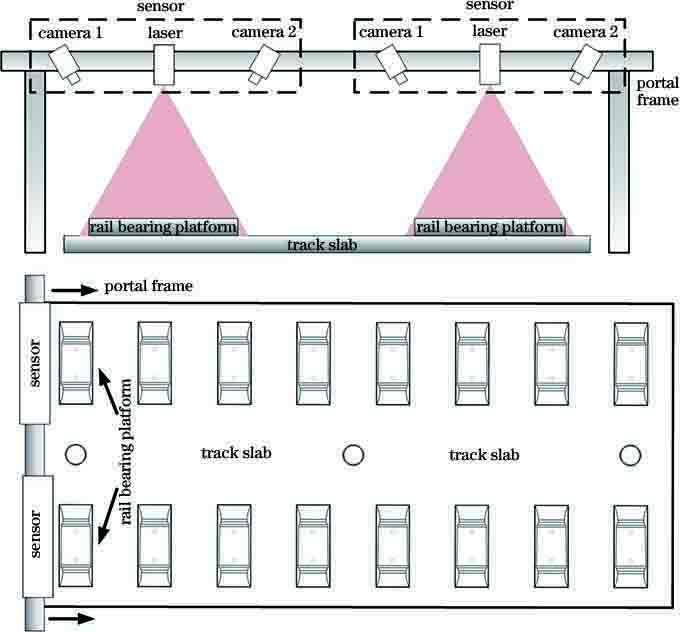
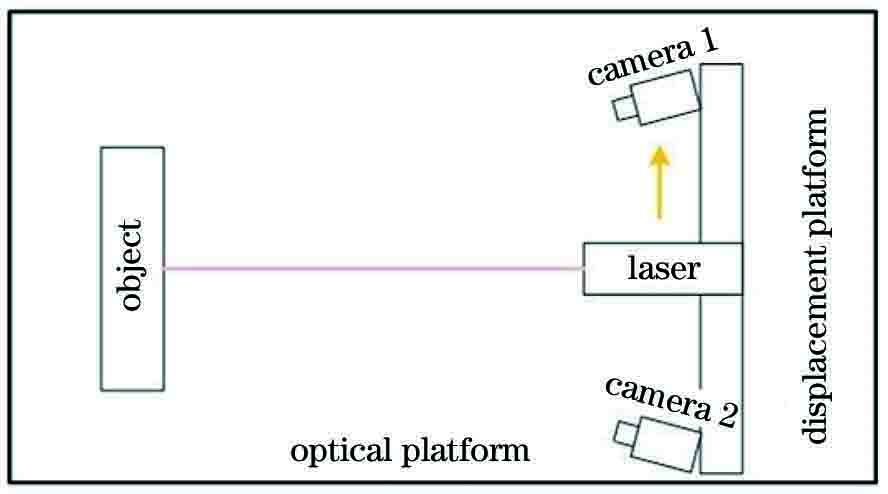
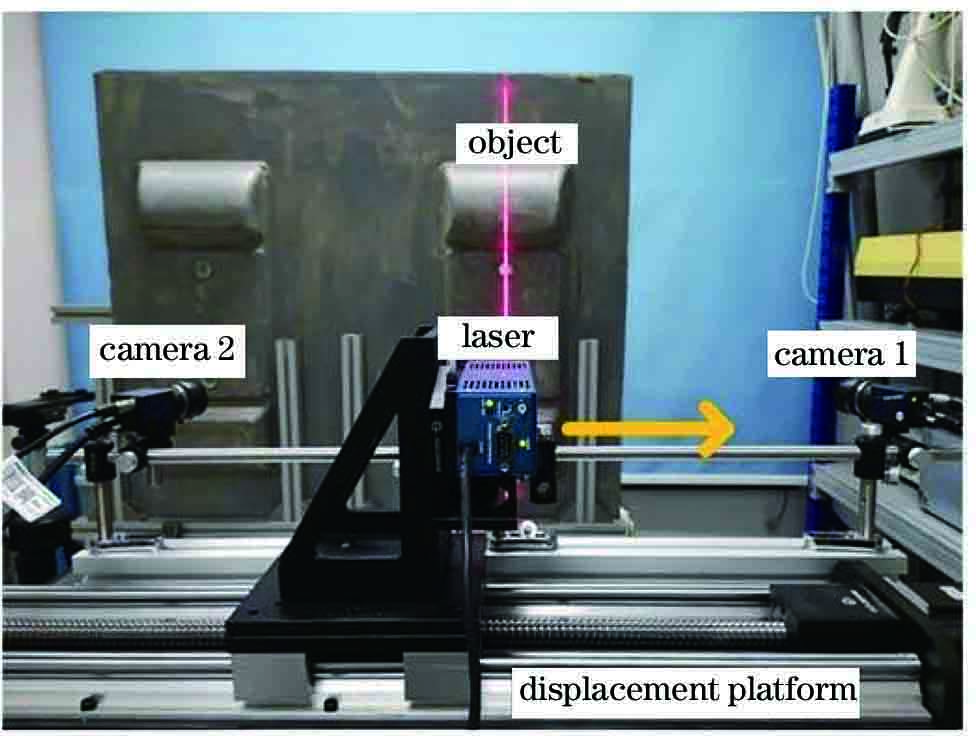
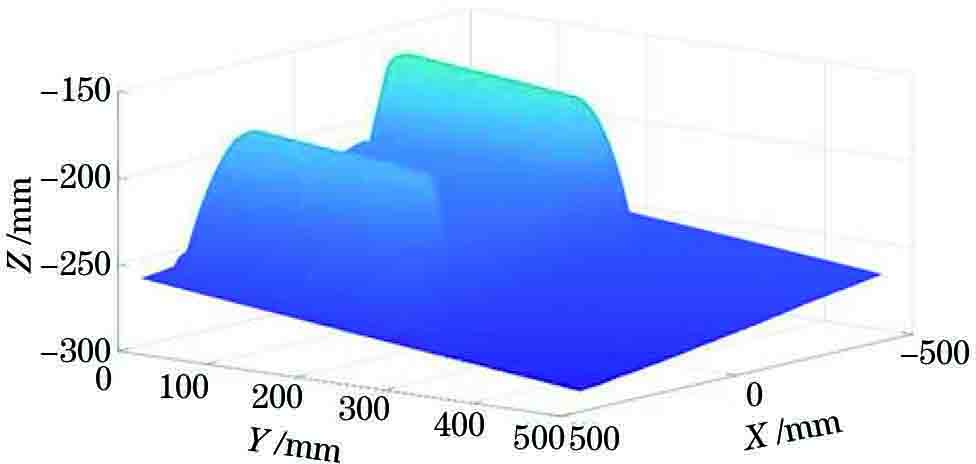
图 6. 点云数据提取。(a)各剖面轮廓Z坐标之和;(b) Spearman秩相关系数;(c)承轨台剖面轮廓提取效果;(d)单个承轨台剖面轮廓Z坐标;(e)Spearman秩相关系数;(f)钳口面、承轨面数据提取效果
Fig. 6. Point cloud data extraction. (a) Sum of Z coordinates of each contour; (b) Spearman rank correlation coefficient; (c) contour extraction effect of rail bearing platform profile; (d) Z coordinates of single rail bearing platform contour profile; (e) Spearman rank correlation coefficient; (f) data extraction effect of clamp surface and bearing surface
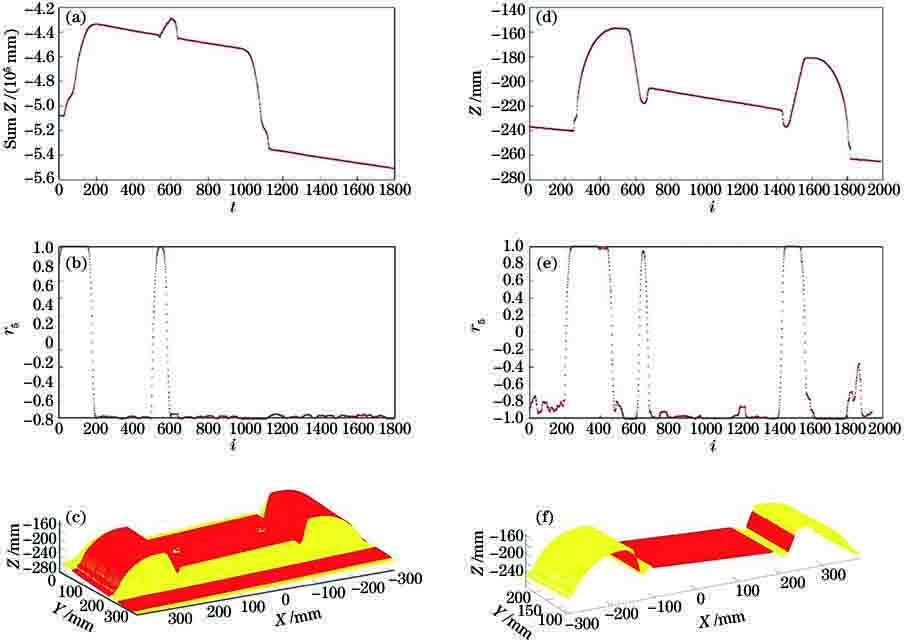
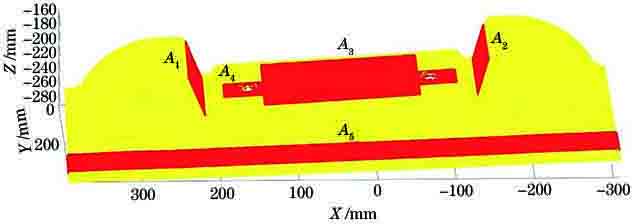
图 8. 单个承轨台钳口距离计算。(a)单轮廓交点确定;(b)空间直线拟合
Fig. 8. Calculating distance of single rail bearing platform jaw. (a) Determination of intersection point of single contour; (b) spatial straight line fitting

图 9. 同一承轨台相邻两套管中心距离计算。(a)单目传感器点云数据;(b)双目传感器点云数据;(c)筛选后的点云数据
Fig. 9. Calculation of center distance between two neighboring casings of same bearing surface. (a) Monocular sensor point cloud data; (b) binocular sensor point cloud data; (c) filtered point cloud data
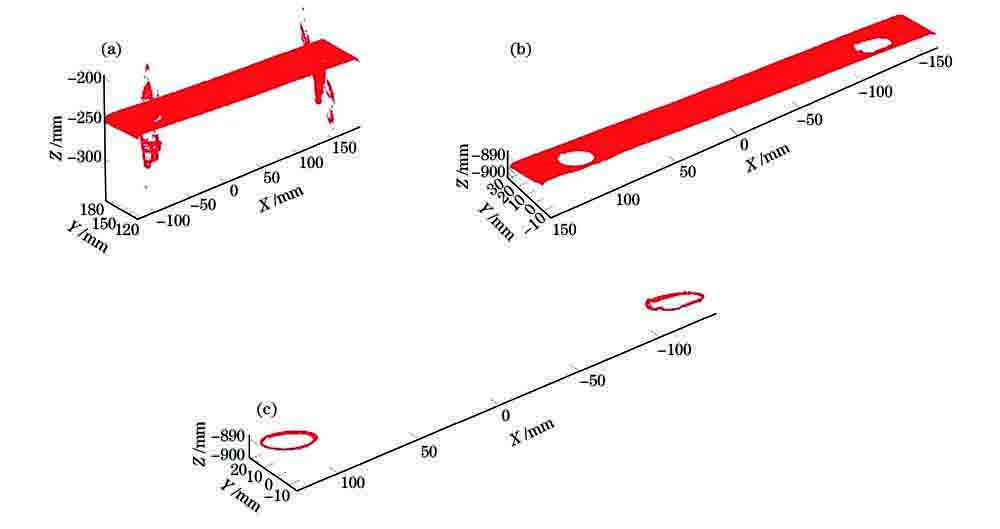
图 10. 双目结构光系统测量误差。(a)承轨面坡度测量误差;(b)承轨面与钳口面夹角测量误差;(c)单个承轨台钳口距离测量误差;(d)相邻两套管中心距离测量误差
Fig. 10. Measurement error of binocular structured light system. (a) Measurement error of bearing surface slope; (b) measurement error of angle between rail bearing surface and jaw surface; (c) measurement error of jaw distance of single rail bearing platform; (d) measurement error of center distance of adjacent casings
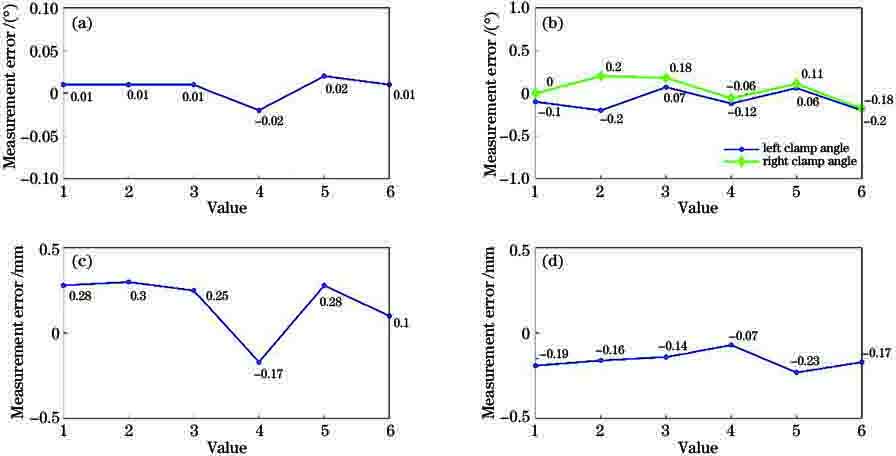
表 1承轨台参数检测标准
Table1. Testing standard of rail bearing platform parameters
|
表 2双目结构光系统测量结果
Table2. Measurement results of binocular structured light system
|
王雪嵩, 邵双运, 苏晓东, 刘绍毅, 罗珏婷. 基于双目线结构光的承轨台测量[J]. 激光与光电子学进展, 2020, 57(21): 211202. Wang Xuesong, Shao Shuangyun, Su Xiaodong, Liu Shaoyi, Luo Jueting. Measurement of Rail Bearing Platform Based on Binocular Line-Structured Light[J]. Laser & Optoelectronics Progress, 2020, 57(21): 211202.



 PDF全文
PDF全文

