穆勒矩阵成像椭偏仪误差源的简化分析方法  下载: 964次
下载: 964次
Simplified Analytical Method for Error Sources in Mueller Matrix Imaging Polarimeter
1 中国科学院上海光学精密机械研究所信息光学与光电技术实验室, 上海 201800
2 中国科学院大学材料与光电研究中心, 北京 100049
图 & 表
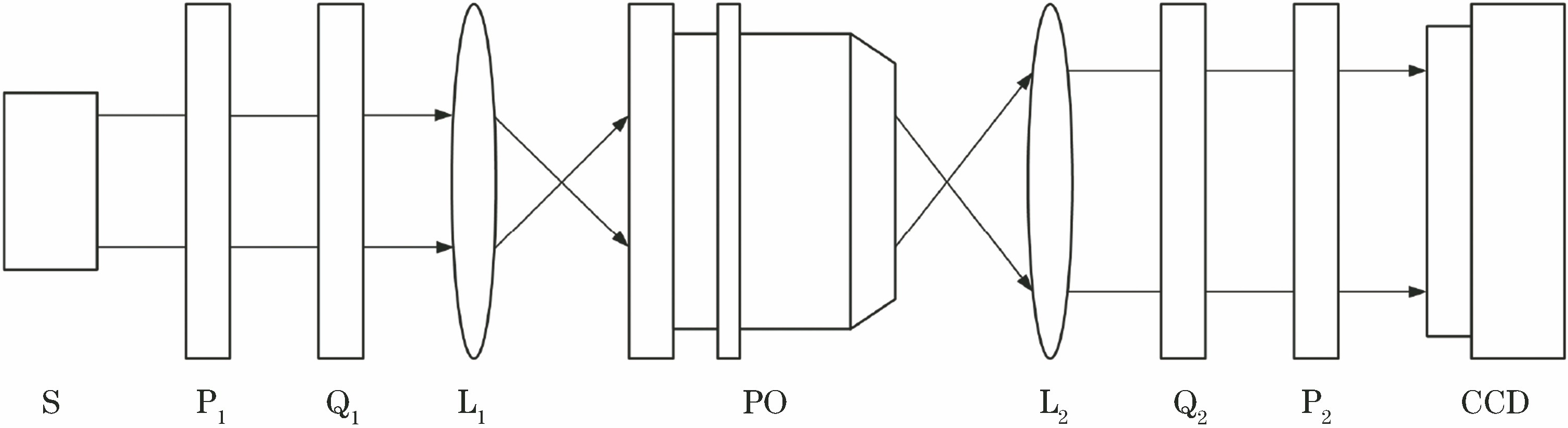
图 1. 用于偏振像差检测的穆勒矩阵成像椭偏仪的结构图
Fig. 1. Structure of Mueller matrix imaging polarimeter for measuring polarization aberration
下载图片 查看原文
图 2. 原始琼斯光瞳。(a)偏振衰减;(b)相位延迟
Fig. 2. Original Jones pupil. (a) Polarization attenuation; (b) phase delay
下载图片 查看原文
图 3. 波片相位延迟误差模型的预测误差统计值。(a)平均值;(b)标准差
Fig. 3. Statistics of prediction errors by using model of delay error of retarder. (a) Mean value; (b) standard deviation
下载图片 查看原文
图 4. 波片偏振衰减误差模型的预测误差统计值。(a)平均值;(b)标准差
Fig. 4. Statistics of prediction errors by using model of polarization attenuation error of retarder. (a) Mean value; (b) standard deviation
下载图片 查看原文
图 5. 波片方位角误差模型的预测误差统计值。(a)平均值;(b)标准差
Fig. 5. Statistics of prediction errors by using model of azimuthal-angle error of retarder. (a) Mean value; (b) standard deviation
下载图片 查看原文
图 6. 两种随机误差引起的穆勒矩阵误差分布的统计值。(a)图像传感器噪声;(b)随机方位角误差
Fig. 6. Statistics of error distribution of Mueller matrix caused by two kinds of random error sources. (a) Image sensor noise; (b) random azimuthal-angle errors of retarders
下载图片 查看原文
图 7. 原始和预测光强误差与波片随机方位角误差的关系
Fig. 7. Relationship between original and predicted intensity errors and random azimuthal-angle error of retarder
下载图片 查看原文
图 8. 图像传感器噪声引起的穆勒矩阵误差。(a)原始值;(b)预测值
Fig. 8. Errors of Mueller matrix caused by noise of image sensor. (a) Original values; (b) predicted values
下载图片 查看原文
图 9. 随机方位角误差引起的穆勒矩阵误差。(a)原始值;(b)预测值
Fig. 9. Errors of Mueller matrix caused by random azimuthal-angle errors of retarders. (a) Original values; (b) predicted values
下载图片 查看原文
表 1穆勒矩阵成像椭偏仪的误差源
Table1. Error sources in Mueller matrix imaging polarimeter
| Error type | Element | Error parameter | Typical value |
|---|
| Quarter-wave plates | Retardance error δ | 0.001π | | Q1, Q2 | Diattenuation error ε | 0.01 | | Systematic | | Azimuthal angle error Δθ /(°) | 0.1 | | Polarizers | Diattenuation error ε | 0.01 | | P1, P2 | Retardance error δ | 0.001π | | | Azimuthal angle error Δθ /(°) | 0.1 | | Random | Image sensor CCD | Noise σ (ΔI) | 0.003 | | (normal distribution) | Q1, Q2 | Azimuthal angle error σ (ΔθR) /(°) | 0.1 |
|
查看原文
表 2含波片相位延迟误差的光强傅里叶系数
Table2. Fourier coefficients of light intensity influenced by delay errorof retarder
| Order | Term | Coefficient of Fourier series | Approximate coefficient |
|---|
| 0 | 1 | m11/4+(1-s1) (m12+m21)/8+(1-s1)2m22/16 | m11/4+(1-s1) (m12+m21)/8+(1-2s1) m22/16 | | 1 | cos(2θ) | 0 | 0 | | 2 | sin(2θ) | -c1m14/4-c1 (1-s1) m24/8 | -m14/4-(1-s1) m24/8 | | 3 | cos(2kθ) | 0 | 0 | | 4 | sin(2kθ) | c1m41/4+c1 (1-s1) m42/8 | m41/4+(1-s1) m42/8 | | 5 | cos[2(1+k)θ] | c12m44/8 | m44/8 | | 6 | sin[2(1+k)θ] | 0 | 0 | | 7 | cos[2(1-k)θ] | -c12m44/8 | -m44/8 | | 8 | sin[2(1-k)θ] | 0 | 0 | | 9 | cos(4θ) | (1-s12) m22/16+(1+s1) m12/8 | m22/16+(1+s1) m12/8 | | 10 | sin(4θ) | (1-s12) m23/16+(1+s1) m13/8 | m23/16+(1+s1) m13/8 | | 11 | cos(4kθ) | (1-s12) m22/16+(1+s1) m21/8 | m22/16+(1+s1) m21/8 | | 12 | sin(4kθ) | (1-s12) m32/16+(1+s1) m31/8 | m32/16+(1+s1) m31/8 | | 13 | cos[4(1+k)θ] | (1+s1)2 (m22-m33)/32 | (1+2s1) (m22-m33)/32 | | 14 | sin[4(1+k)θ] | (1+s1)2 (m23+m32)/32 | (1+2s1) (m23+m32)/32 | | 15 | cos[4(1-k)θ] | (1+s1)2 (m22+m33)/32 | (1+2s1) (m22+m33)/32 | | 16 | sin[4(1-k)θ] | (1+s1)2 (m23-m32)/32 | (1+2s1) (m23-m32)/32 | | 17 | cos[2(1+2k)θ] | c1 (1+s1) m34/16 | (1+s1) m34/16 | | 18 | sin[2(1+2k)θ] | -c1 (1+s1) m24/16 | -(1+s1) m24/16 | | 19 | cos[2(1-2k)θ] | -c1 (1+s1) m34/16 | -(1+s1) m34/16 | | 20 | sin[2(1-2k)θ] | -c1 (1+s1) m24/16 | -(1+s1) m24/16 | | 21 | cos[2(2+k)θ] | -c1 (1+s1) m43/16 | -(1+s1) m43/16 | | 22 | sin[2(2+k)θ] | c1 (1+s1) m42/16 | (1+s1) m42/16 | | 23 | cos[2(2-k)θ] | c1 (1+s1) m43/16 | (1+s1) m43/16 | | 24 | sin[2(2-k)θ] | -c1 (1+s1) m42/16 | -(1+s1) m42/16 |
|
查看原文
表 3含波片偏振衰减和方位角误差的光强傅里叶系数
Table3. Fourier coefficients of light intensity influenced by diattenuation and azimuthal-angle error of retarder
| Order | Term | Approximate coefficient (ε) | Approximate coefficient (θ) |
|---|
| 0 | 1 | (1-2s2) (m11/4+(m12+m21)/8+m22/16) | m11/4+(m12+m21)/8+m22/16 | | 1 | cos(2θ) | s2 (m11/4+m12/4+m21/8+m22/8) | -s3 (m14/4+m24/8) | | 2 | sin(2θ) | -(m14/4+m24/8)+s2 (m14/2+m24/4+m13/4+m23/8) | -(m14/4+m24/8) | | 3 | cos(2kθ) | s2 (m11/4+m21/4+m12/8+m22/8) | s3 (m41/4+m42/8) | | 4 | sin(2kθ) | (m41/4+m42/8)-s2 (m41/2+m42/4-m31/4-m32/8) | (m41/4+m42/8) | | 5 | cos[2(1+k)θ] | m44/8-s2 (m44/4-m34/8+m43/8) | m44/8 | | 6 | sin[2(1+k)θ] | -s2 (m14/8+m24/8-m41/8-m42/8) | -s3m44/4 | | 7 | cos[2(1-k)θ] | -m44/8+s2 (m44/4-m34/8+m43/8) | -m44/8 | | 8 | sin[2(1-k)θ] | -s2 (m14/8+m24/8+m41/8+m42/8) | 0 | | 9 | cos(4θ) | (1-2s2) (m12/8+m22/16) | (m12/8+m22/16)+s3 (m13/4+m23/8) | | 10 | sin(4θ) | (1-2s2) (m13/8+m23/16) | (m13/8+m23/16)-s3 (m12/4+) | | 11 | cos(4kθ) | (1-2s2) (m21/8+m22/16) | (m21/8+m22/16)+s3 (m31/4+m32/8) | | 12 | sin(4kθ) | (1-2s2) (m31/8+m32/16) | (m31/8+m32/16)-s3 (m21/4+) | | 13 | cos[4(1+k)θ] | (1-2s2) (m22-m33)/32 | (m22-m33)/32+s3 (m23+m32)/8 | | 14 | sin[4(1+k)θ] | (1-2s2) (m23+m32)/32 | (m23+m32)/32-s3 (m22-m33)/8 | | 15 | cos[4(1-k)θ] | (1-2s2) (m22+m33)/32 | (m22+m33)/32 | | 16 | sin[4(1-k)θ] | (1-2s2) (m23-m32)/32 | (m23-m32)/32 | | 17 | cos[2(1+2k)θ] | m34/16-s2 (m34/8+-m21/16-m22/16) | m34/16-3s3m24/16 | | 18 | sin[2(1+2k)θ] | -m24/16+s2 (m24/8+m23/16+m31/16+m32/16) | -m24/16-3s3m34/16 | | 19 | cos[2(1-2k)θ] | -m34/16+s2 (m34/8++m21/16+m22/16) | -m34/16+s3m24/16 | | 20 | sin[2(1-2k)θ] | -m24/16+s2 (m24/8+m23/16-m31/16-m32/16) | -m24/16-s3m34/16 | | 21 | cos[2(2+k)θ] | -m43/16+s2 (m43/8-+m12/16+m22/16) | -m43/16+3s3m42/16 | | 22 | sin[2(2+k)θ] | m42/16-s2 (m42/8-m32/16-m13/16-m23/16) | m42/16+3s3m43/16 | | 23 | cos[2(2-k)θ] | m43/16-s2 (m43/8--m12/16-m22/16) | m43/16-s3m42/16 | | 24 | sin[2(2-k)θ] | -m42/16+s2 (m42/8-m32/16+m13/16+m23/16) | -m42/16-s3m43/16 |
|
查看原文
表 4偏振元件角度配置方案
Table4. Angle configuration of polarization element
| Configuration | Angle of P1θ1 /(°) | Angle of Q1ϕ1 /(°) | Angle of Q2ϕ2 /(°) | Angle of P2θ2 /(°) |
|---|
| 1×144×1 | 0 | 0, 1.25, 2.5, …, 178.75 | 6ϕ1 | 0 |
|
查看原文
孟泽江, 李思坤, 王向朝, 步扬, 戴凤钊, 杨朝兴. 穆勒矩阵成像椭偏仪误差源的简化分析方法[J]. 光学学报, 2019, 39(9): 0911002. Zejiang Meng, Sikun Li, Xiangzhao Wang, Yang Bu, Fengzhao Dai, Chaoxing Yang. Simplified Analytical Method for Error Sources in Mueller Matrix Imaging Polarimeter[J]. Acta Optica Sinica, 2019, 39(9): 0911002.












 PDF全文
PDF全文

