基于三维激光雷达的障碍物及可通行区域实时检测  下载: 1726次
下载: 1726次
Real-Time Detection of Obstacles and Passable Areas Based on Three-Dimensional Lidar
1 武汉理工大学现代汽车零部件技术湖北省重点实验室, 湖北 武汉 430070
2 武汉理工大学汽车工程学院, 湖北 武汉 430070
图 & 表
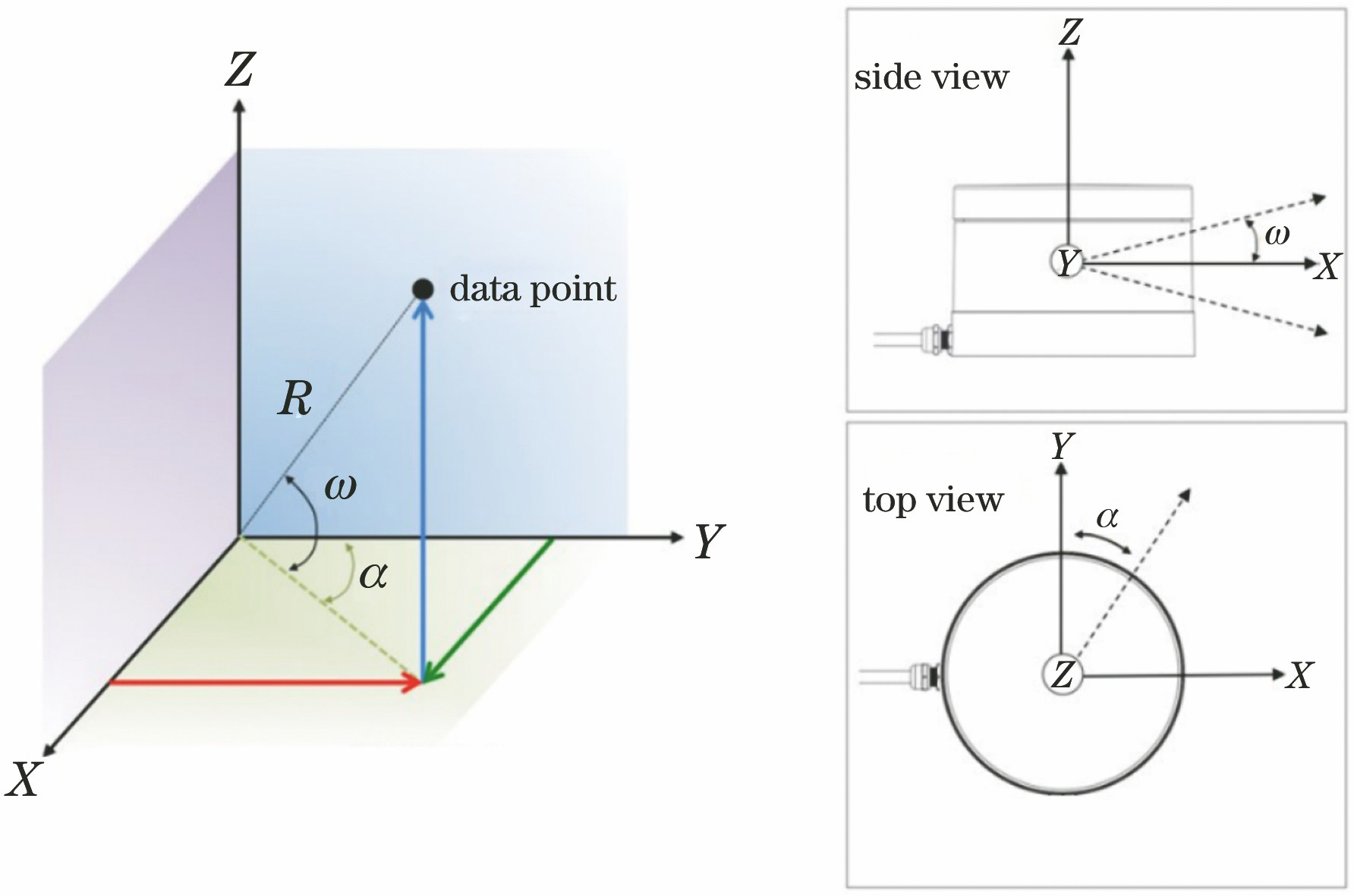
图 1. 激光雷达三维坐标系
Fig. 1. Three-dimensional coordinate system of lidar
下载图片 查看原文
图 2. 点云直通滤波结果图。(a)原始点云;(b)直通滤波后点云
Fig. 2. Through-pass filter results for point clouds. (a) Original point cloud; (b) through-pass filtered point cloud
下载图片 查看原文
图 3. 点云统计滤波结果图
Fig. 3. Statistical filtering result of point clouds
下载图片 查看原文
图 4. 地面与非地面点云分割效果对比图。(a)基于形态学滤波器地面分离算法;(b)地面坡度分离算法
Fig. 4. Comparison of segmentation effects of ground and non-ground point clouds. (a) Ground separation algorithm based on morphological filter; (b) ground slope separation algorithm
下载图片 查看原文
图 5. 障碍物检测对比图。(a)欧氏聚类算法障碍物检测;(b)改进欧氏聚类算法障碍物检测
Fig. 5. Obstacle detection comparison chart. (a) Euclidean clustering algorithm for obstacle detection; (b) improved Euclidean clustering algorithm for obstacle detection
下载图片 查看原文
图 6. 激光束距离示意图。(a)激光束距离侧视图;(b)激光束距离俯视图
Fig. 6. Diagram of laser beam distance. (a) Side view of laser beam distance; (b) top view of laser beam distance
下载图片 查看原文
图 7. 可通行区域检测结果。(a)图3场景地面点云;(b)地面点可通行区域检测
Fig. 7. Detection results of passable areas. (a) Ground point cloud in Fig. 3; (b) detection of ground point passable area
下载图片 查看原文
图 8. 合并检测结果
Fig. 8. Combined detection results
下载图片 查看原文
图 9. 实验平台。(a)正面图;(b)侧面图
Fig. 9. Experimental platform. (a) Front view; (b) side view
下载图片 查看原文
图 10. 上坡路况检测结果。(a)上坡场景;(b)激光雷达原始点云;(c)非地面障碍物检测结果;(d)地面可通行区域检测结果;(e)合并检测结果(1:车,2:人,长方体框:单一障碍物)
Fig. 10. Detection results of uphill road condition. (a) Uphill scene; (b) lidar original point cloud; (c) detection result of non-ground obstacle; (d) detection result of ground passable area; (e) combined detection results (1: car, 2: person, cuboid frame: single obstacle)
下载图片 查看原文
图 11. 下坡路况检测结果。(a)下坡场景;(b)激光雷达原始点云;(c)非地面障碍物检测结果;(d)地面可通行区域检测结果;(e)合并检测结果(1:车,2、3:人,长方体框:单一障碍物)
Fig. 11. Detection results of downhill road condition. (a) Downhill scene; (b) lidar original point cloud; (c) detection result of non-ground obstacle; (d) detection result of ground passable area; (e) combined detection result (1: car, 2,3: person, cuboid frame: single obstacle)
下载图片 查看原文
图 12. 本文算法检测耗时
Fig. 12. Detection time-consuming of the proposed algorithm
下载图片 查看原文
表 1Velodyne VLP-16激光雷达基本参数
Table1. Basic parameters of Velodyne VLP-16 lidar
| Parameter | Value |
|---|
| Measurement range /m | 0-100 | | Range accuracy /cm | 3 | | Vertical field of view /(°) | -15.0-15.0 | | Vertical angular resolution /(°) | 2.0 | | Horizontal field of view /(°) | 360 | | Horizontal angular resolution /(°) | 0.2 | | Rotation rate /Hz | 10 | | Laser wavelength /nm | 903 |
|
查看原文
表 2各激光束对应距离
Table2. Distance corresponding to each laser beam
| Laser No. | Vertical angle /(°) | Le /m | ΔSe /m |
|---|
| G1 | -15 | 8.024 | 0.028 | | G2 | -13 | 9.313 | 0.033 | | G3 | -11 | 11.061 | 0.038 | | G4 | -9 | 13.575 | 0.047 | | G5 | -7 | 17.510 | 0.061 |
|
查看原文
表 3不同路况的算法平均准确率
Table3. Average accuracy of algorithm for different road conditions%
| Experimental road condition | Average accuracy |
|---|
| Euclidean clustering algorithms+adjacent point cloud spacing algorithms | Improved Euclidean clustering algorithms+adjacent point cloud spacing algorithms |
|---|
| Flat road condition | 89.57 | 94.76 | | Uphill road condition | 87.63 | 93.72 | | Downhill road condition | 88.26 | 93.91 |
|
查看原文
蒋剑飞, 李其仲, 黄妙华, 龚杰. 基于三维激光雷达的障碍物及可通行区域实时检测[J]. 激光与光电子学进展, 2019, 56(24): 242801. Jianfei Jiang, Qizhong Li, Miaohua Huang, Jie Gong. Real-Time Detection of Obstacles and Passable Areas Based on Three-Dimensional Lidar[J]. Laser & Optoelectronics Progress, 2019, 56(24): 242801.














 PDF全文
PDF全文

