单像空间后方交会算法的研究  下载: 1050次
下载: 1050次
A New Algorithm for Single Image Space Based Resection
图 & 表
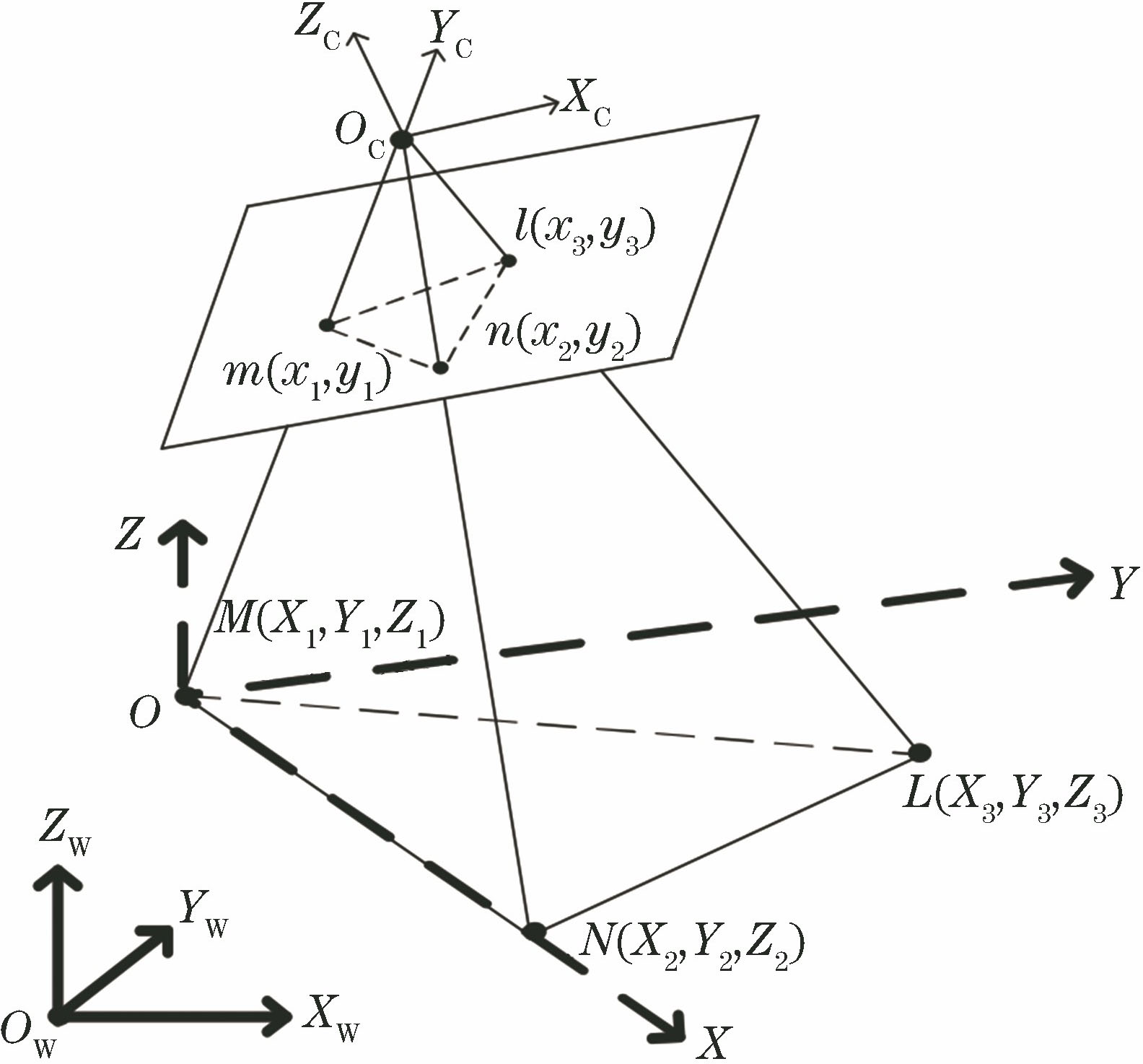
图 1. 三点后方交会原理示意图
Fig. 1. Schematic of three-point resection principle
下载图片 查看原文
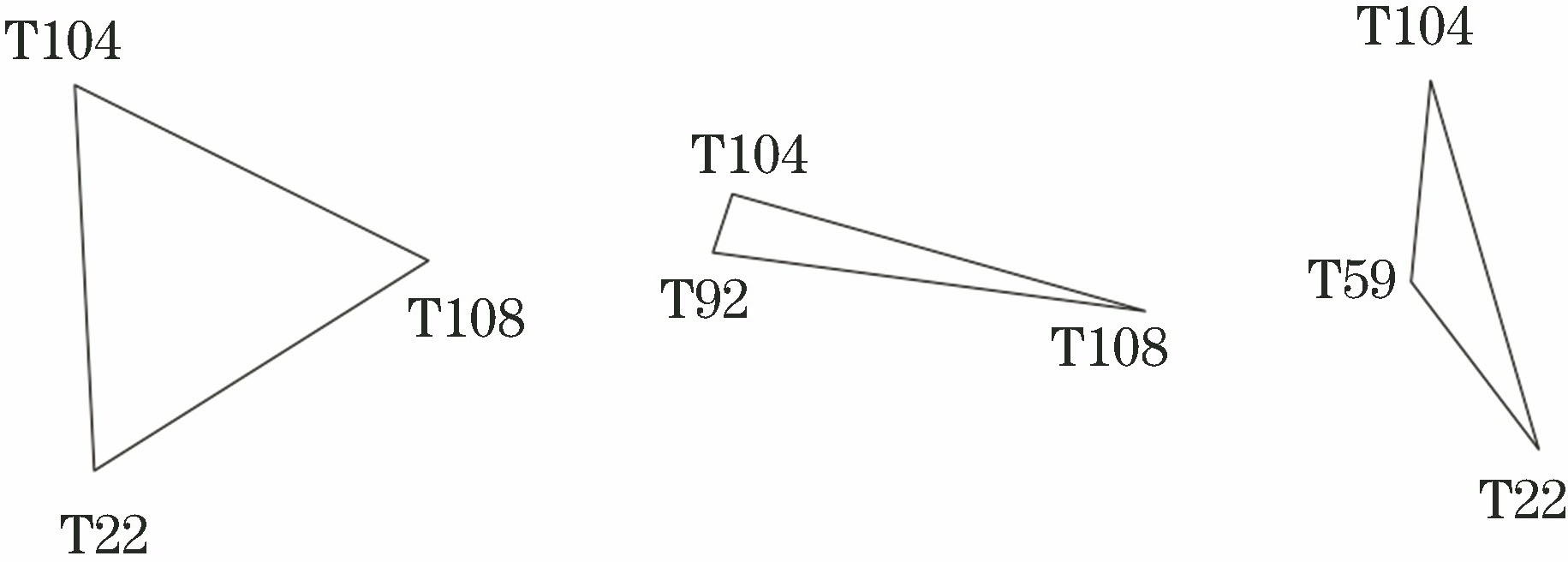
图 2. Picture 1中任意3点分布情况示意图
Fig. 2. Distribution of the control field points in picture 1
下载图片 查看原文
表 1三维坐标与二维图像点坐标及相机外参数
Table1. Three-dimensional coordinates, point coordinates of 2D image, and the external parameters of camera
| Picture | Point | (X,Y,Z) /mm | (x,y) /mm | Rotation angle /(°) | External parameter /mm |
|---|
| 1 | T104 | (1670.895,-409.056,-3430.976) | (-3.0933,6.7968) | RX=3.2707 | XS=595.3770 | | T92 | (1476.960,-429.497,-3472.916) | (-3.0017,5.5785) | | | | T108 | (1531.414,-1572.302,-3129.078) | (4.2927,6.1865) | RY=148.9017 | YS=853.9520 | | T59 | (905.211,-687.339,-3540.126) | (-1.4984,2.0549) | RZ=174.8506 | ZS=-4015.7280 | | T22 | (318.084,-562.148,-3722.013) | (-2.3782.-1.5668) | | | | 2 | T218 | (1029.608,859.527,-3956.419) | (6.1794,5.1611) | RX=176.6173 | XS=473.1250 | | T180 | (1628.232,541.346,-3717.694) | (10.3908,3.4198) | RY=59.0670 | YS=867.6090 | | T50 | (877.690,-114.723,-3711.865) | (5.6319,-0.7990) | | | | T110 | (1848.411,-7.630,-3502.972) | (12.4942,-0.1053) | RZ=20.5861 | ZS=-3703.3520 | | 3 | T71 | (1339.4444,19.6515,-3229.0245) | (10.1810,0.1491) | RX=37.5930 | XS=1802.0107 | | T18 | (-106.9948,1151.5441,-3118.2956) | (-0.8424,9.0631) | RY=2.0048 | YS=-355.9519 | | T148 | (60.8357,-1337.2001,-3811.6095) | (0.3919,-8.6104) | RZ=-38.0667 | ZS=-3144.2854 |
|
查看原文
表 2使用本文方法和角锥体法计算得到的相机外参数
Table2. Results calculated by proposed algorithm and pyramid algorithm
| Picture | Point | Proposed algorithm | Pyramid algorithm |
|---|
| Rotation angle /(°) | External parameter /mm | Rotation angle /(°) | External parameter /mm |
|---|
| 1 | T104T22T108T104T92T108T104T59T22 | RX=-3.2706RY=148.9007RZ= 174.8491RX=-3.2710RY=148.9011RZ= 174.8501RX=-3.2715RY=148.9013RZ= 174.8533 | XS=595.371YS=853.956ZS=-4015.724XS=595.300YS=853.984ZS=-4015.756XS=595.319YS=853.965ZS=-4015.634 | RX=-3.2711RY=149.1014RZ=175.8730RX=-3.2723RY=148.9037RZ= 174.8634RX=-3.2731RY=148.9041RZ= 174.8442 | XS=595.388YS=853.973ZS=-4015.731XS=595.382YS=853.967ZS=-4015.774XS=595.371YS=853.984ZS=-4015.752 |
|
查看原文
表 3使用本文算法和DLT算法计算得到的相机外参数
Table3. Results calculated by proposed algorithm and DLT algorithm
| Picture | Point | Proposed algorithm | DLT algorithm |
|---|
| Rotation angle /(°) | External parameter /mm | Rotation angle /(°) | External parameter /mm |
|---|
| 2 | T218T180T50T218T180T110 | RX=176.6150RY=59.0650RZ=20.5861RX=176.6230RY=59.0665RZ=20.5862 | XS=473.081YS=867.981ZS=-3703.194XS=473.104YS=867.351ZS=-3703.412 | RX=176.6167RY=59.0670RZ=20.5865RX=176.6177RY=59.0681RZ=20.5833 | XS=473.107YS=867.631ZS=-3703.357XS=473.115YS=867.634ZS=-3703.323 |
|
查看原文
表 4在3个控制点中同时建立坐标系的计算结果
Table4. Calculation results in three coordinate systems
| No. | Point | External parameter (XS,YS,ZS) /mm |
|---|
| 1 | T71,T18,T148 | (1802.0109,-355.9513,-3144.2852) | | 2 | T18,T148,T71 | (1802.0122,-355.9536,-3144.2883) | | 3 | T71,T18,T148 | (1802.0098,-355.9502,-3144.2821) |
|
查看原文
表 5三元二次方程组求解结果
Table5. Results of solving the quadratic equations
| No. | Initial value | Result |
|---|
| 1 | (1,0,0) | (0.6117,0.7334,-0.2966) | | 2 | (-0.577,-0.577,0.577) | (-0.6117,-0.7334,0.2966) | | 3 | (-0.6,-0.7,0.38) | (-0.6117,-0.7334,0.2966) |
|
查看原文
陈继华, 孙荣旭, 张斌. 单像空间后方交会算法的研究[J]. 激光与光电子学进展, 2020, 57(2): 021504. Chen Jihua, Sun Rongxu, Zhang Bin. A New Algorithm for Single Image Space Based Resection[J]. Laser & Optoelectronics Progress, 2020, 57(2): 021504.



 PDF全文
PDF全文

