基于微振镜结构光投射器的机器人抓取  下载: 902次
下载: 902次
Robot Bin-Picking Based on Micro-Electro Mechnical System Structure Light Projector
1 西南科技大学信息工程学院, 四川 绵阳 621000
2 四川大学电子信息学院, 四川 成都 610065
图 & 表
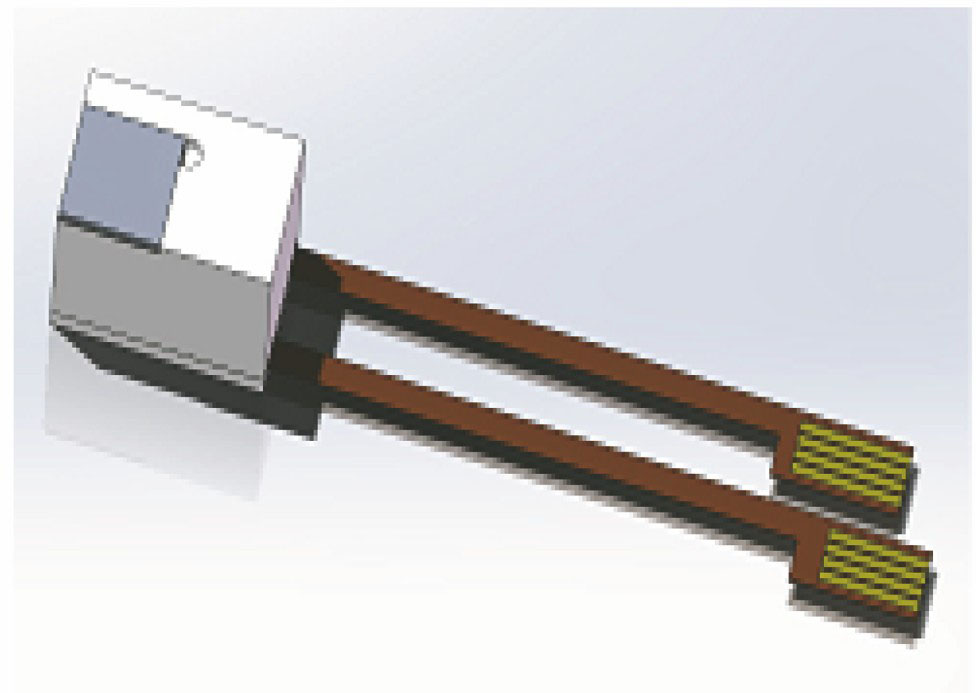
图 1. 激光模组示意图
Fig. 1. Schematic of laser module
下载图片 查看原文
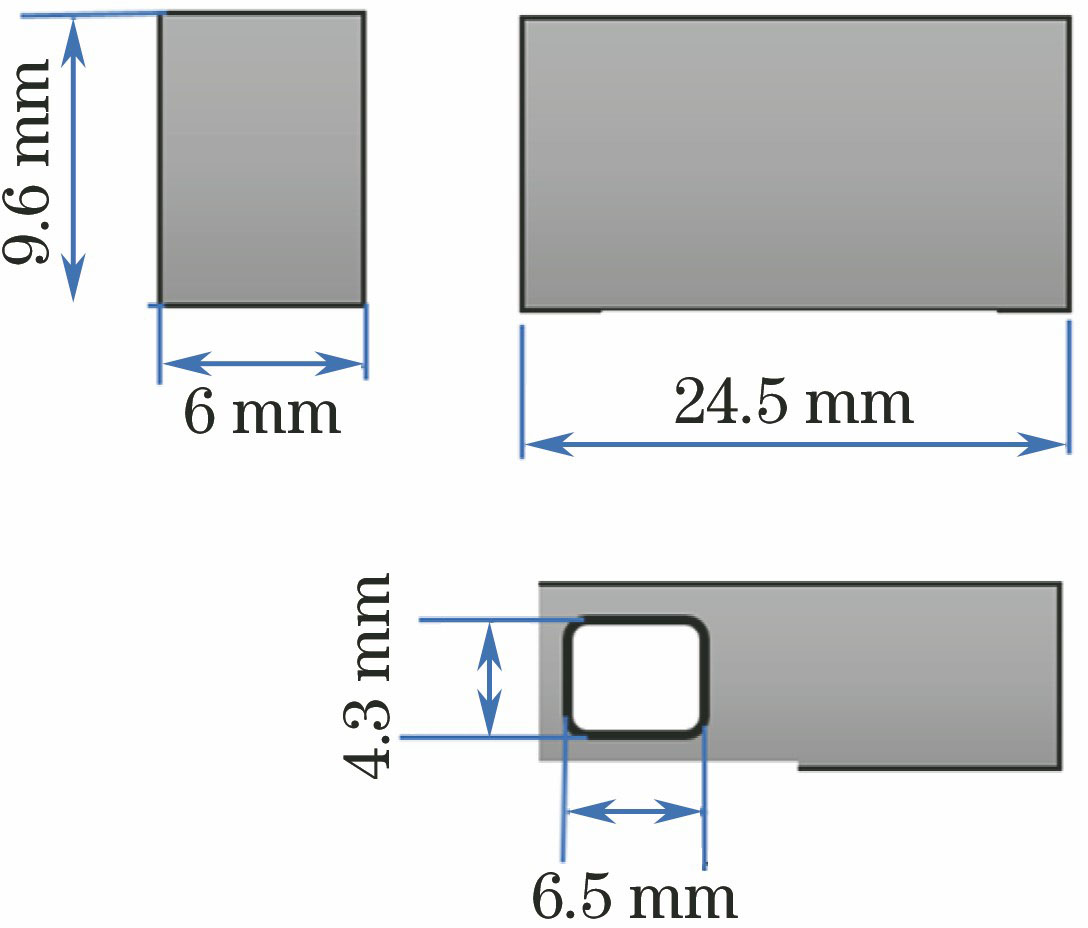
图 2. 激光模组尺寸参数
Fig. 2. Laser module size parameters
下载图片 查看原文
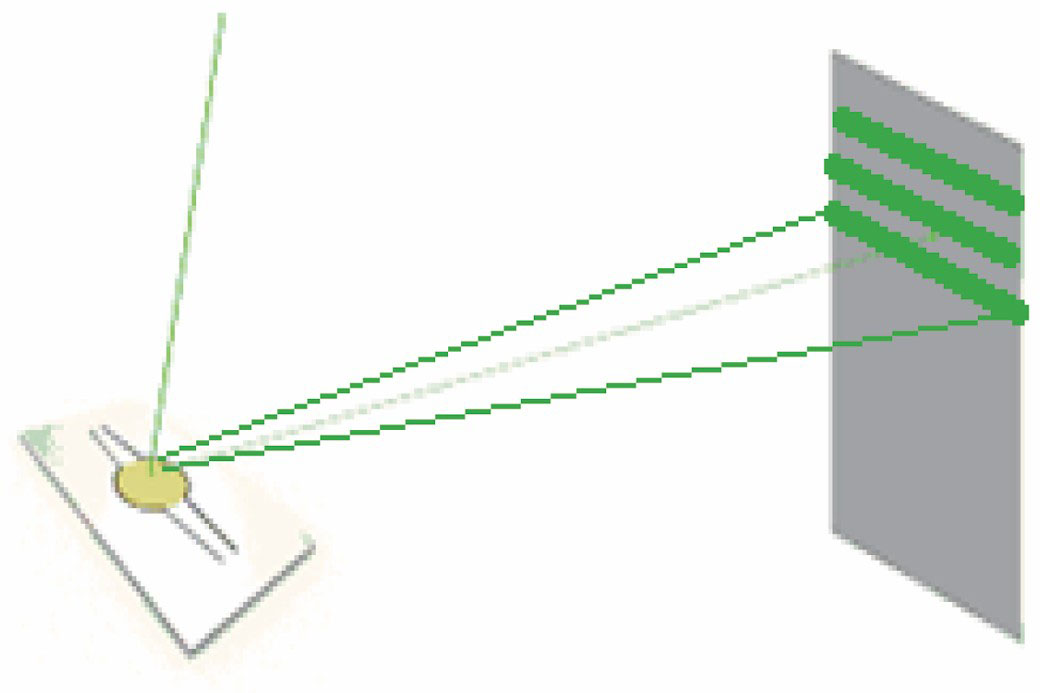
图 3. 微振镜扫描方式
Fig. 3. MEMS scanning mode
下载图片 查看原文
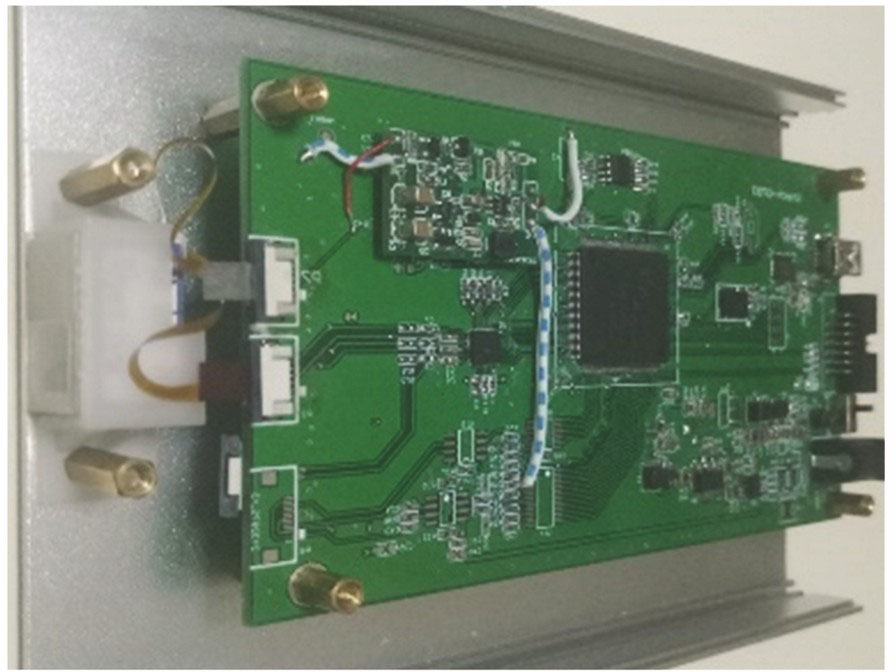
图 4. 硬件电路
Fig. 4. Hardware circuit
下载图片 查看原文
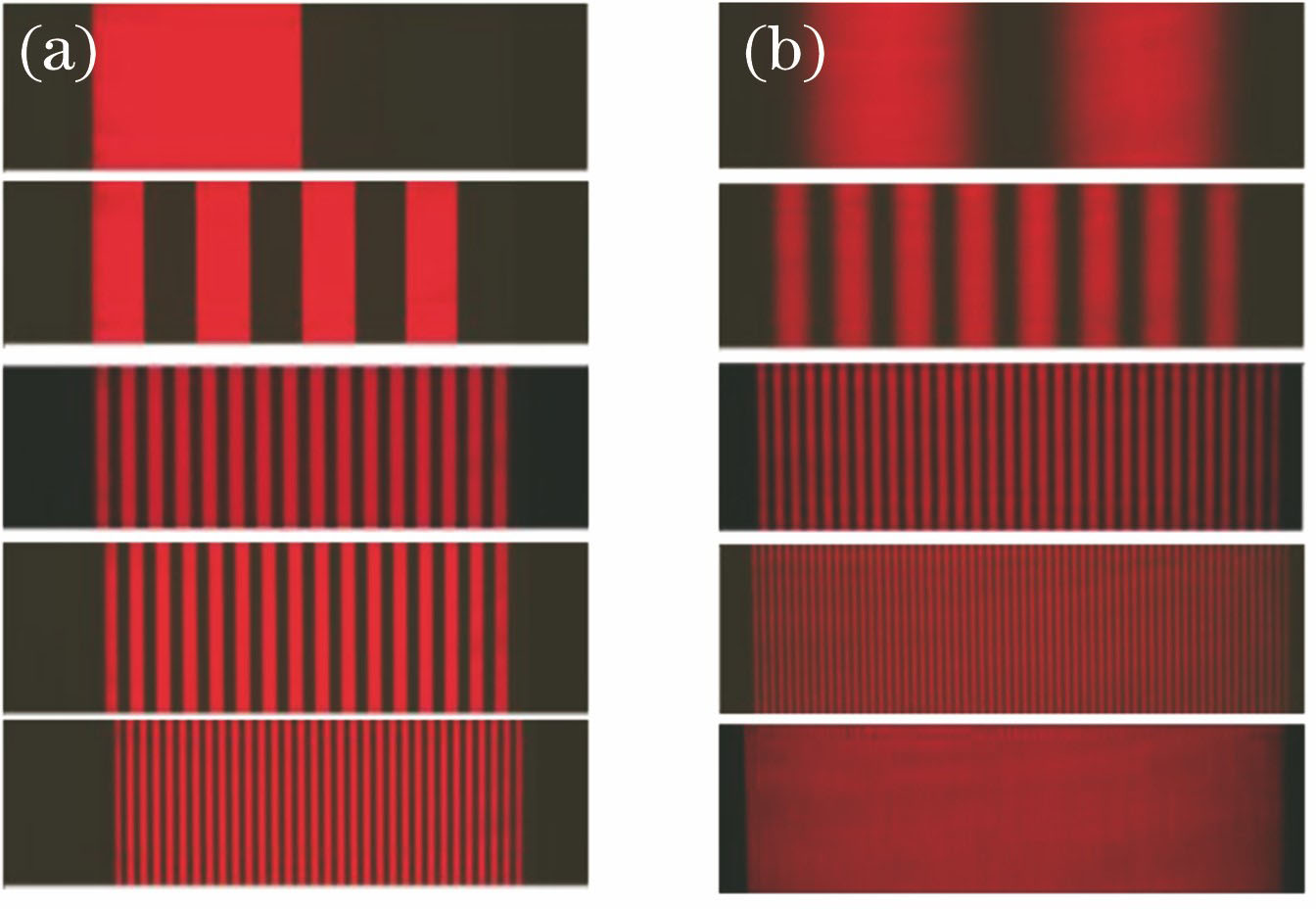
图 5. 投射光栅类型。(a)方波;(b)正弦波
Fig. 5. Projection grating type. (a) Square wave; (b) sine wave
下载图片 查看原文
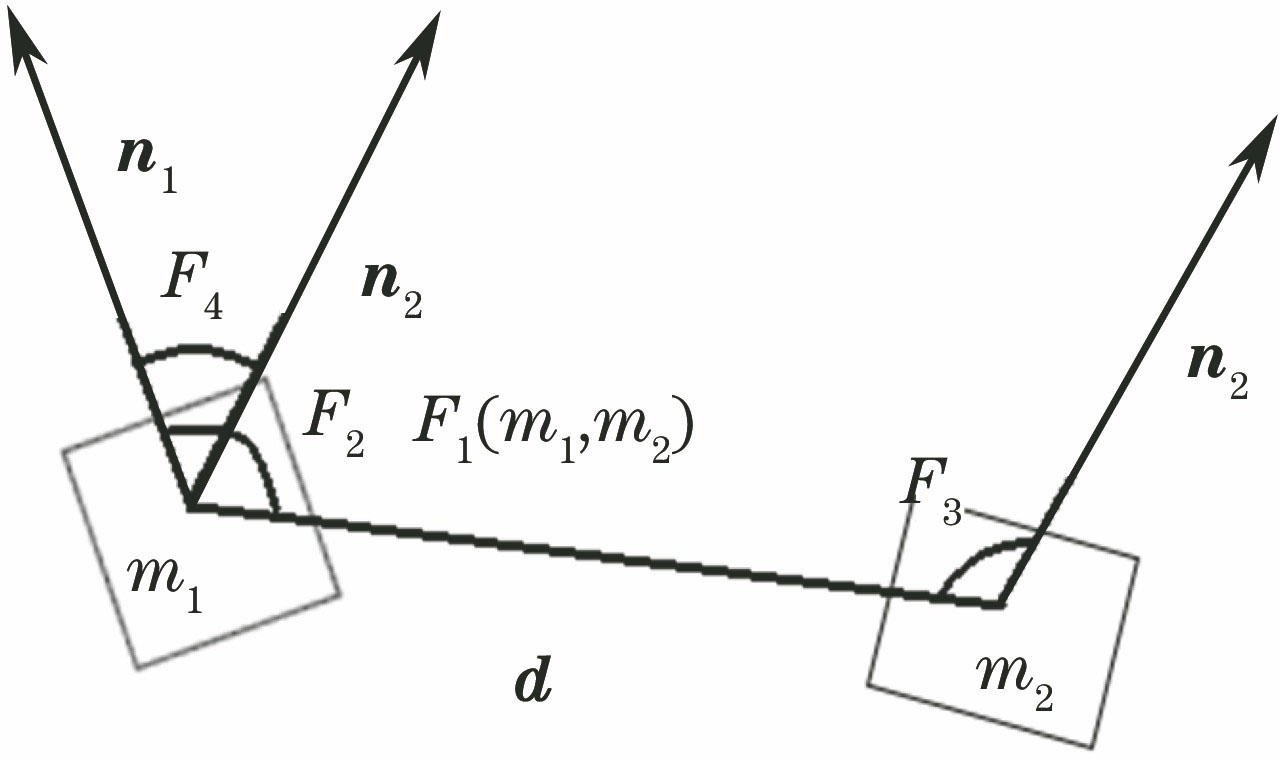
图 6. PPF描述
Fig. 6. PPF description
下载图片 查看原文
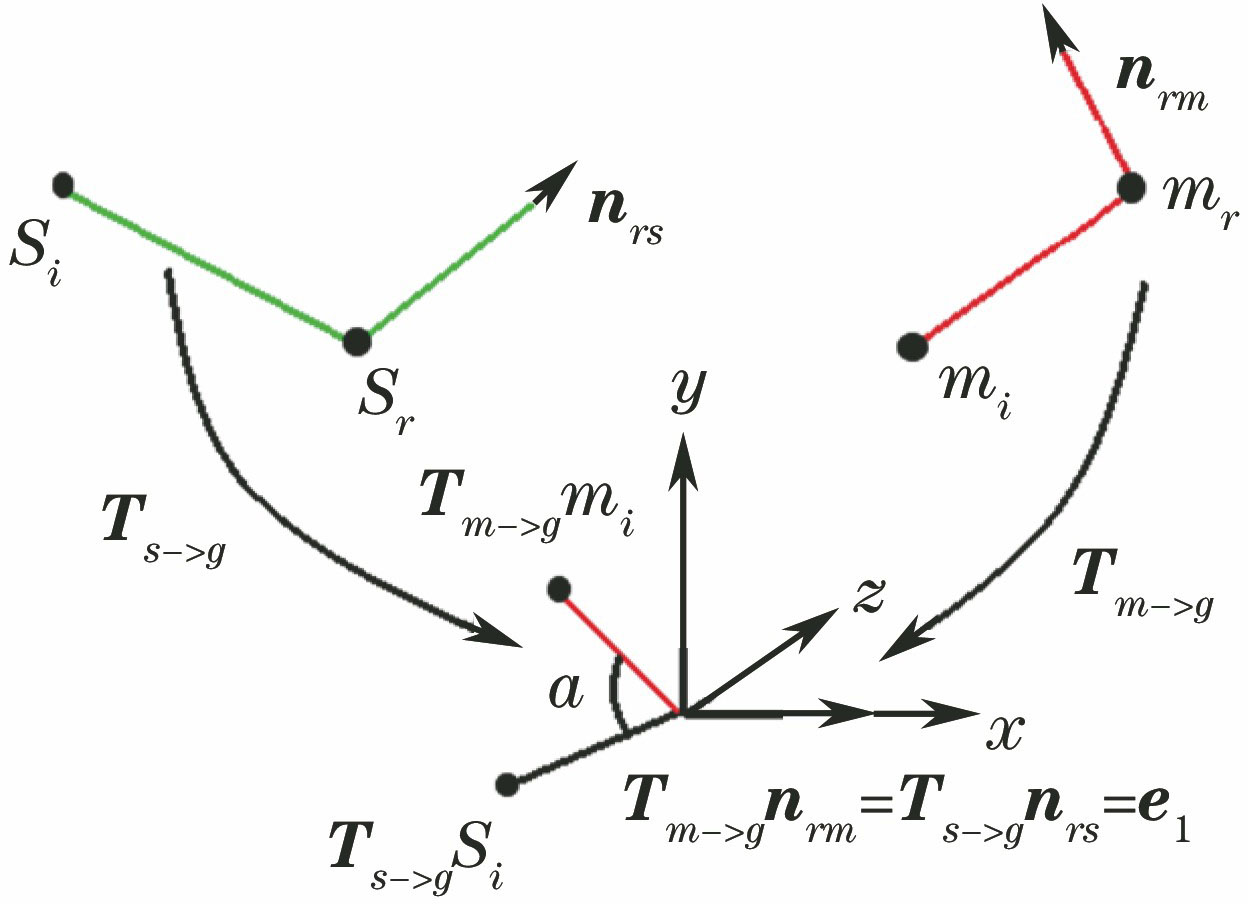
图 7. 变换关系示意图
Fig. 7. Schematic of transform relation
下载图片 查看原文
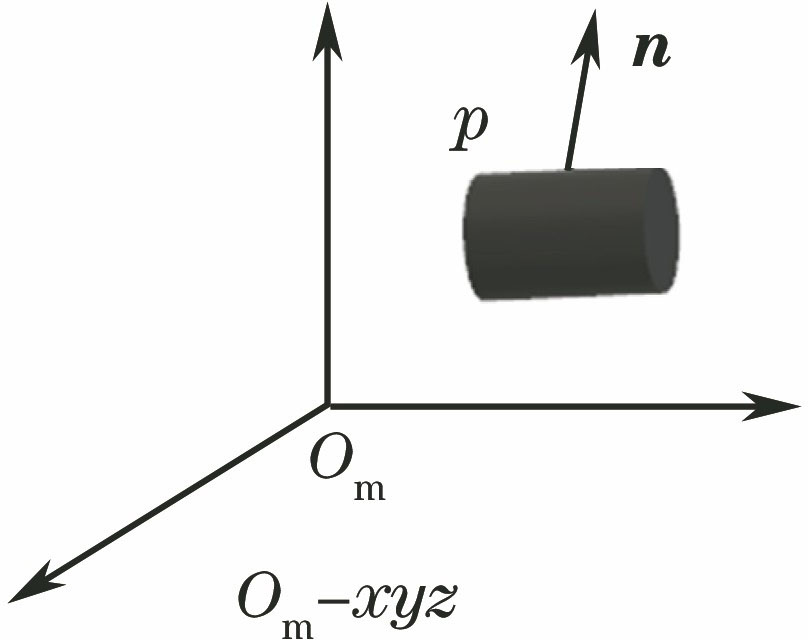
图 8. 模型坐标系
Fig. 8. Model coordinate system
下载图片 查看原文
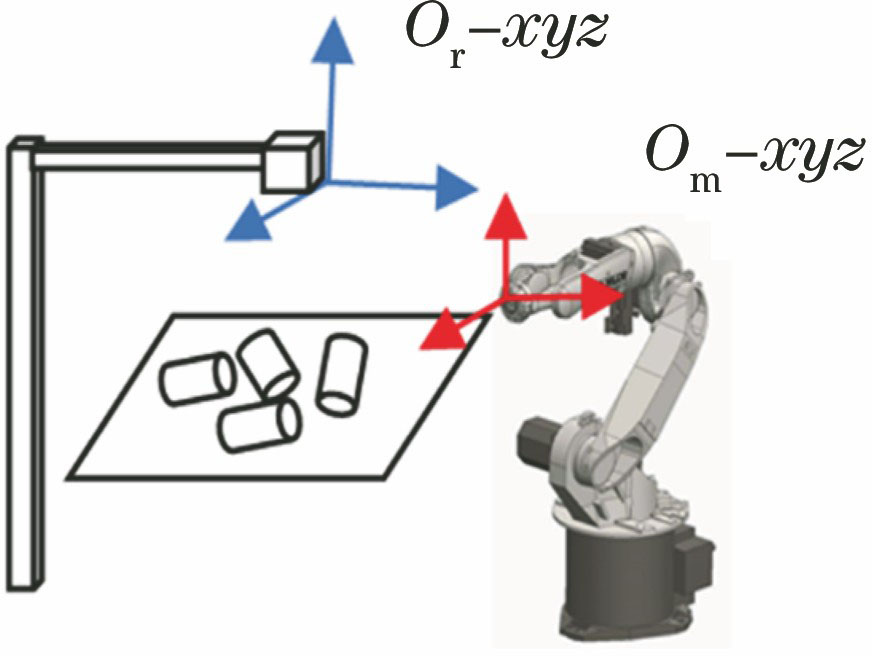
图 9. 坐标系之间的关系
Fig. 9. Relations between coordinate systems
下载图片 查看原文
图 10. 快速结构光双目系统
Fig. 10. Fast structure light binocular system
下载图片 查看原文
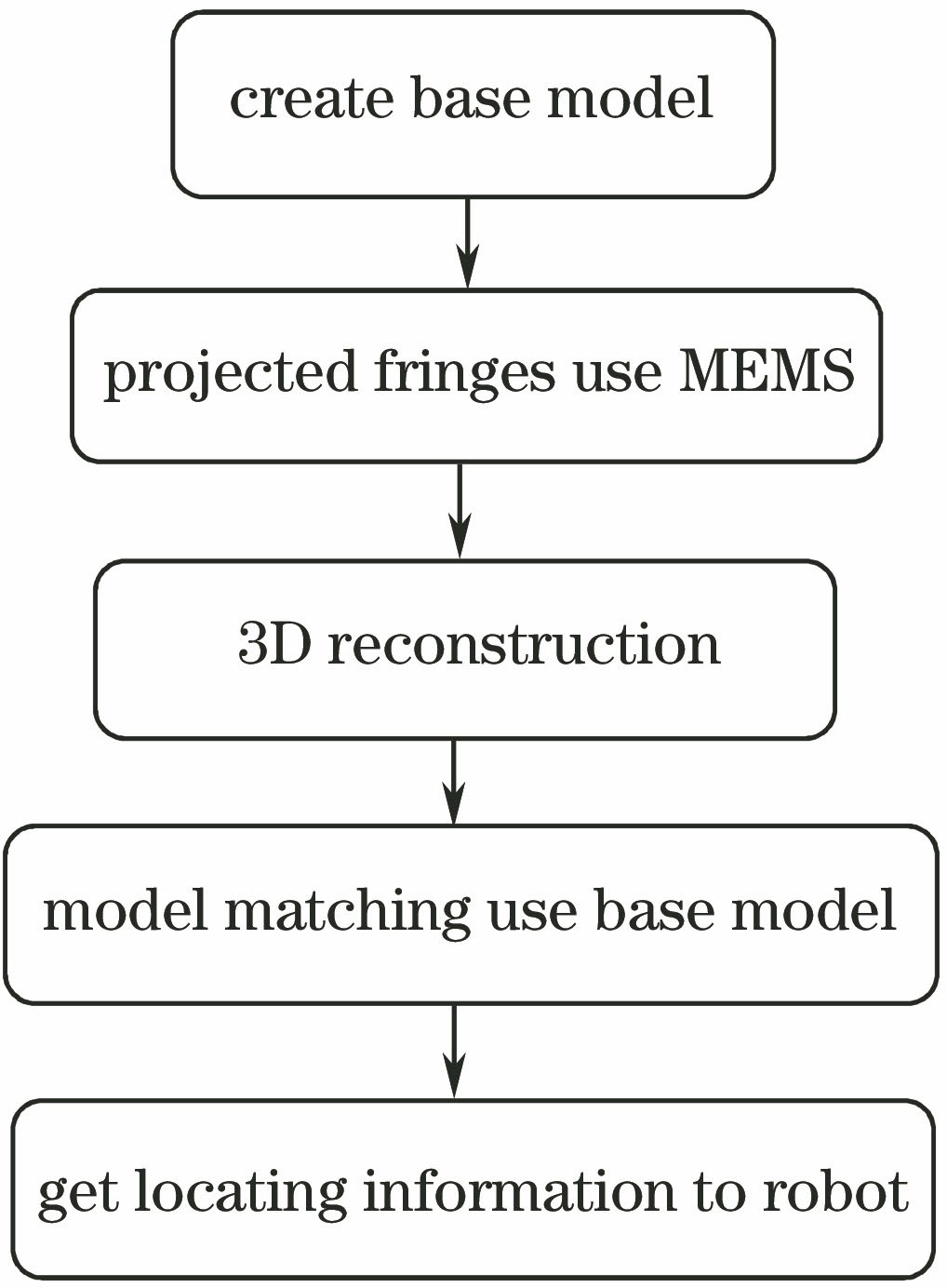
图 11. 实验流程图
Fig. 11. Flow diagram of experiment
下载图片 查看原文
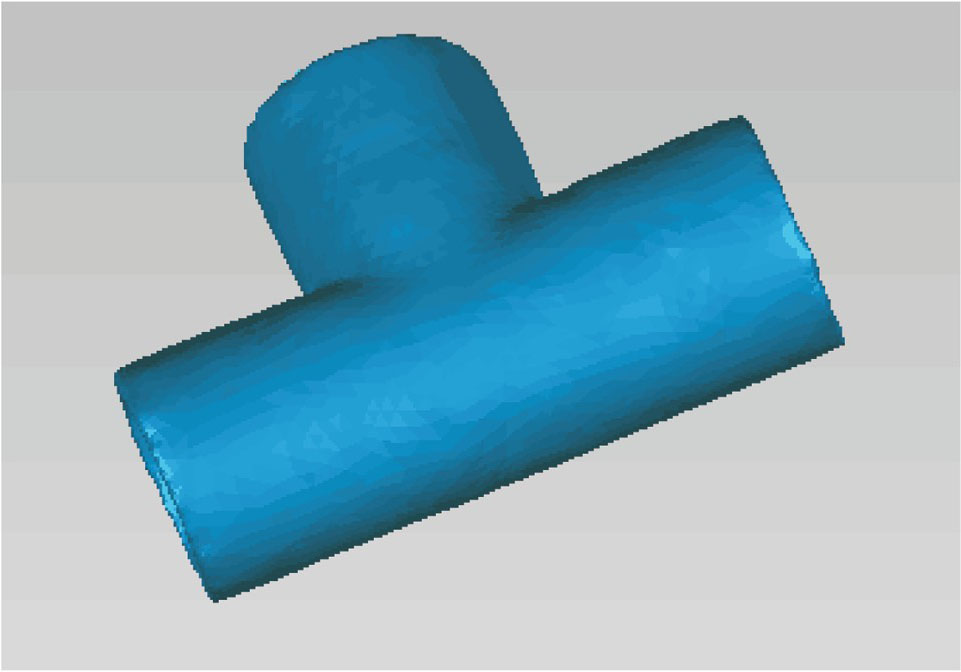
图 12. 基础模型
Fig. 12. Basic model
下载图片 查看原文
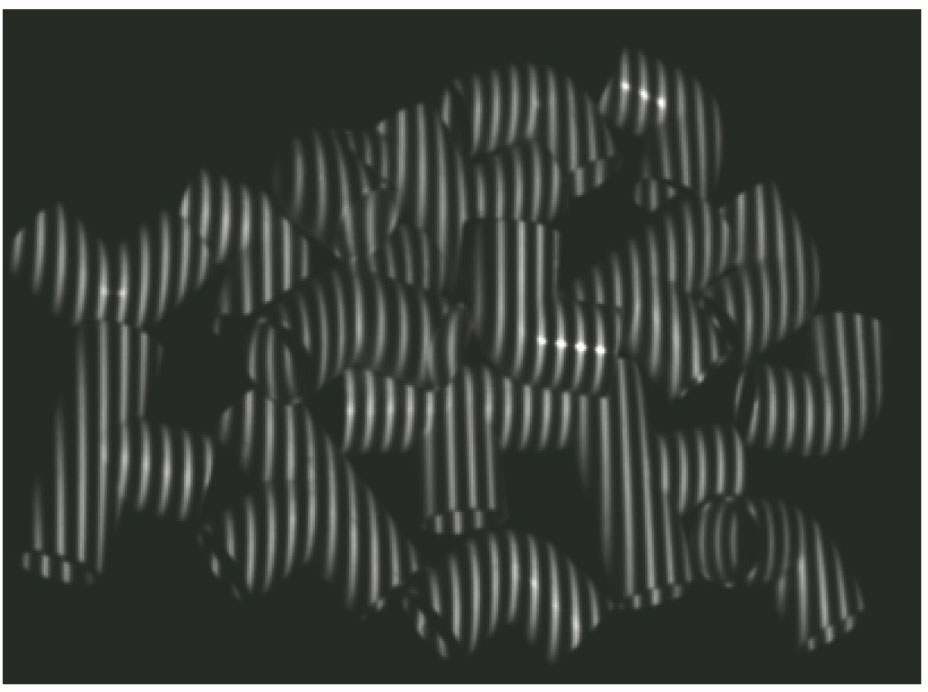
图 13. 光栅投射结果
Fig. 13. Grating projection results
下载图片 查看原文
图 14. 相位主值和相位展开图。(a) 1 Hz的相位主值;(b) 4 Hz的相位主值;(c) 16 Hz的相位主值;(d) 64 Hz的相位主值; (e) 128 Hz的相位主值;(f)相位展开图
Fig. 14. Principal value maps of phase and phase unwrapping graph. (a) Phase principal value of 1 Hz; (b) phase principal value of 4 Hz; (c) phase principal value of 16 Hz; (d) phase principal value of 64 Hz; (e) phase principal value of 128 Hz; (f) phase unwrapping graph
下载图片 查看原文
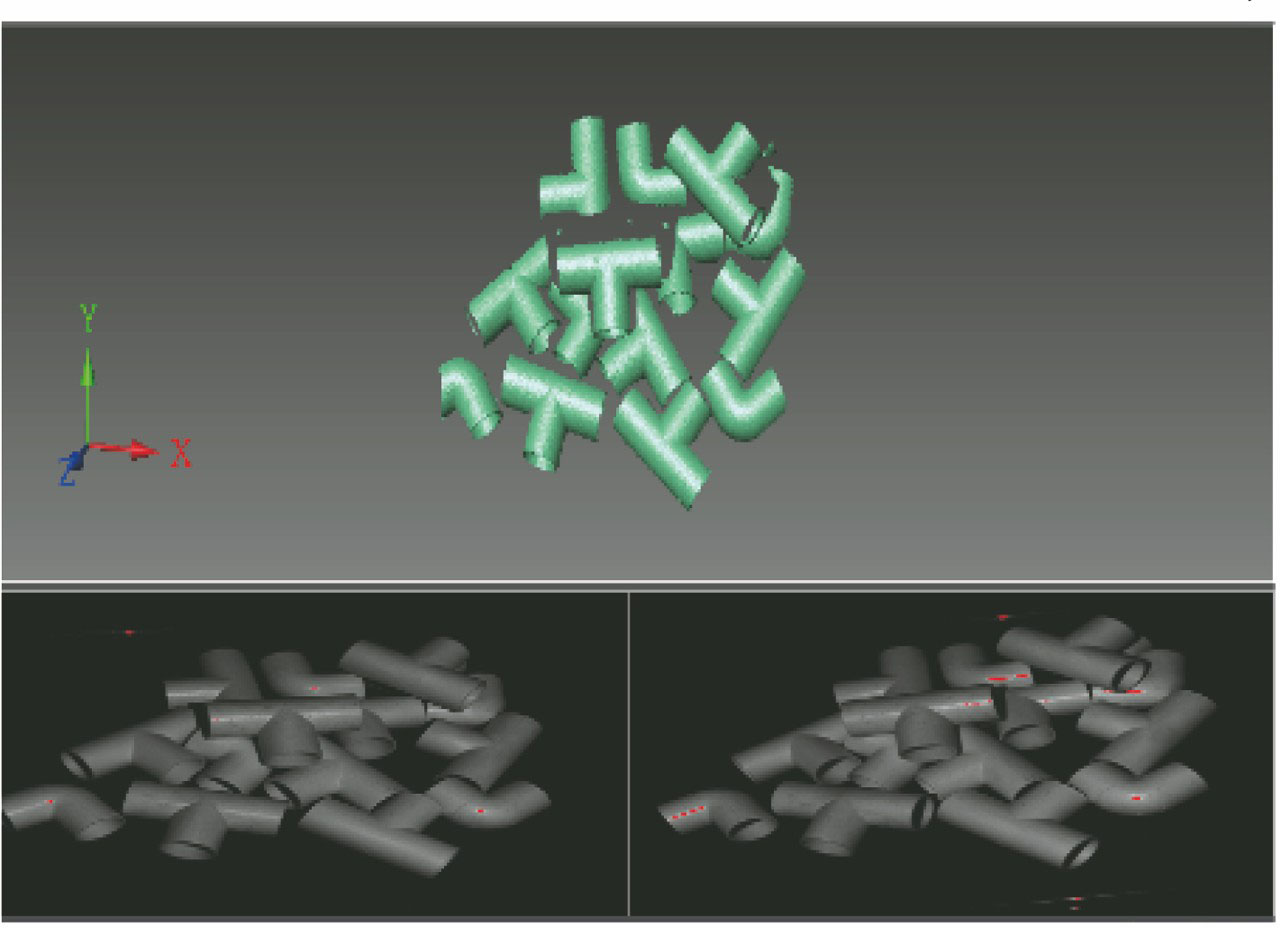
图 15. 三维重建结果
Fig. 15. 3D reconstruction results
下载图片 查看原文
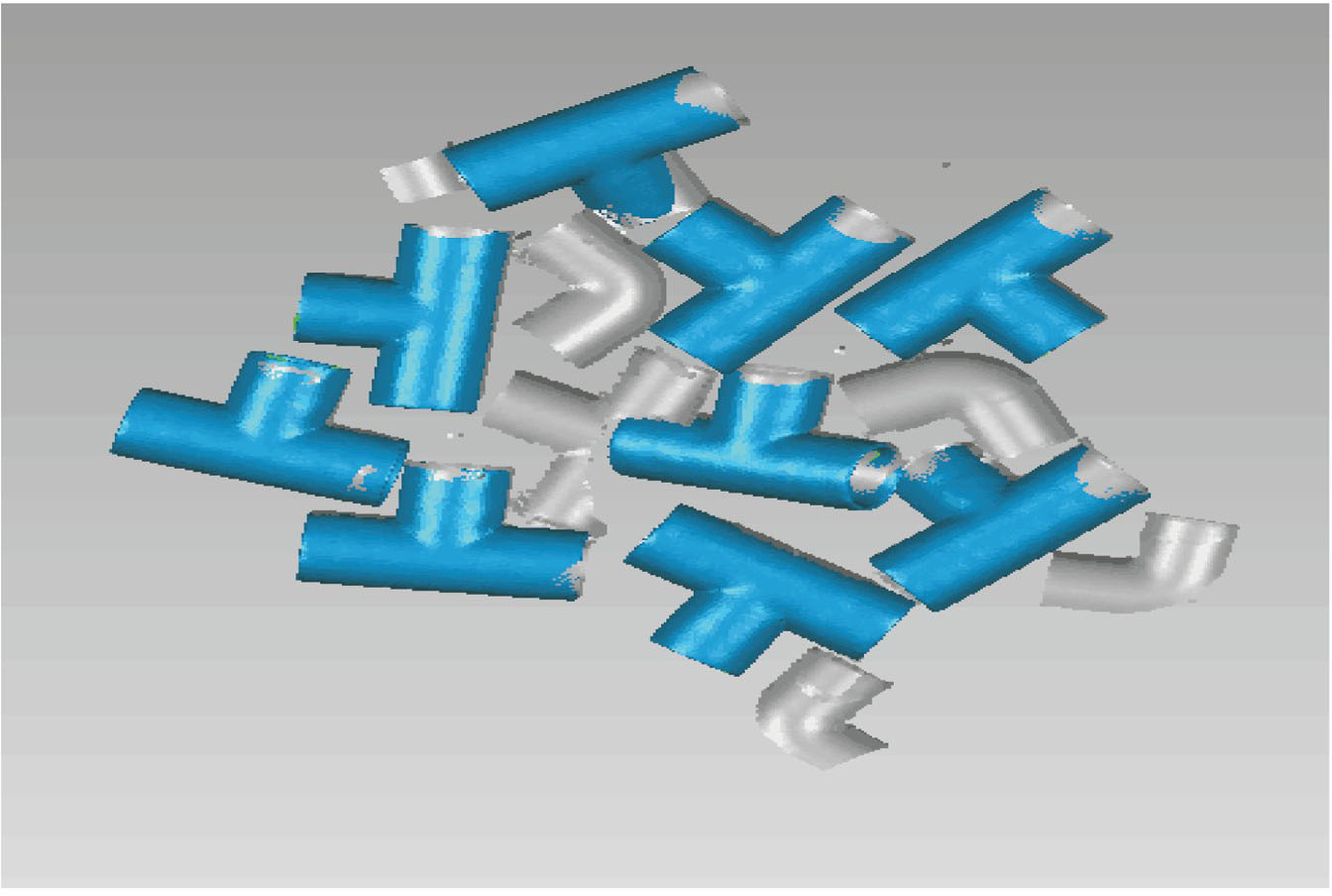
图 16. 正确匹配到的物体
Fig. 16. Correctly matched objects
下载图片 查看原文
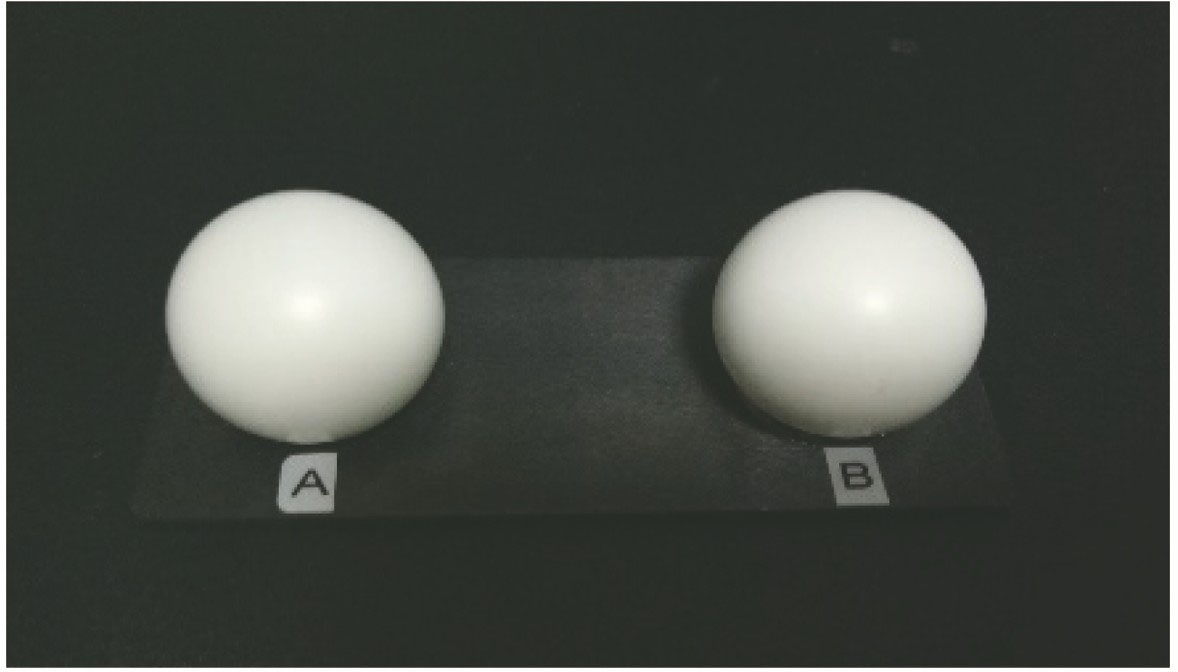
图 17. 标准球
Fig. 17. Standard ball
下载图片 查看原文
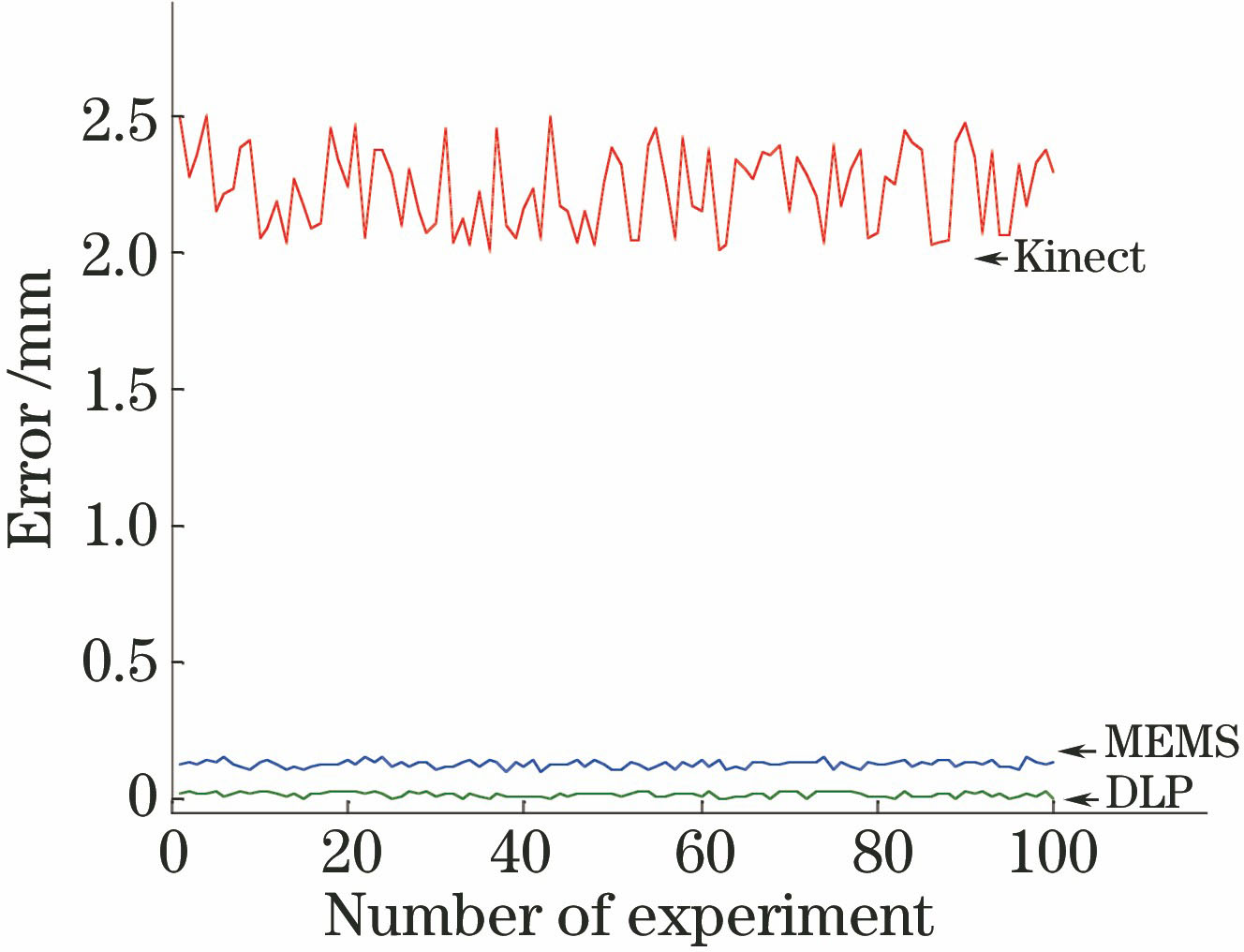
图 18. 误差曲线图
Fig. 18. Error curves
下载图片 查看原文
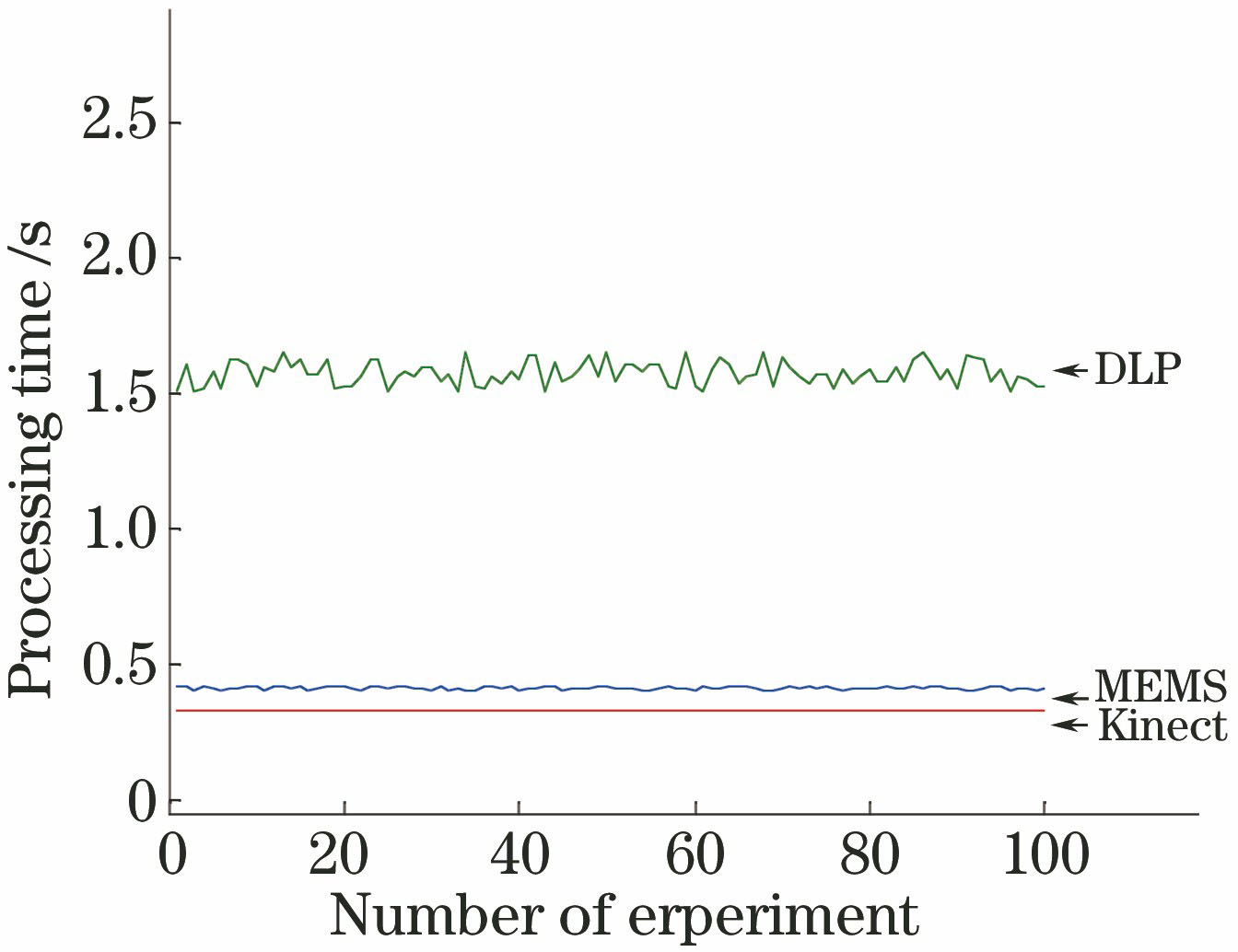
图 19. 处理时间曲线图
Fig. 19. Processing time curves
下载图片 查看原文
表 1微振镜指标参数
Table1. MEMS parameters
| Parameter | Minimum | Typical value | Maximum |
|---|
| Wave length /nm | 820 | 830 | 840 | | Line width /mm | - | 0.75 | - | | Power /mW | 30 | 50 | 80 | | Degree /(°) | 60 | 65 | 70 | | Fringe number | 2 | 2n | 128 | | Frequency /Hz | - | 920 | - |
|
查看原文
表 2激光模组参数
Table2. Laser module parameters
| Parameter | Test rating |
|---|
| Minimum | Maximum |
|---|
| Output power /(pF·mW-1) | 30 | 80 | | Input current /(lm·mA-1) | 70 | 300 | | Voltage /V | - | 3 | | Dimensions /(mm×mm×mm) | 12.6×22.1×12.6 |
|
查看原文
表 3系统参数
Table3. System parameters
| Structure light projector | Camera and lens |
|---|
| Fringe nature | Sine wave | Image resolution /(pixel×pixel) | 1280×1024 | | Fringe number | 21 | Focal length /mm | 12 | | Processingtime /ms | 20 | Frame rate /Hz | 60 |
|
查看原文
表 4定位信息
Table4. Locate information
| Number | 3D coordinates P | Normal n |
|---|
| 1 | (-44.0847,-17.9729,-469.457) | (-0.1524,0.1001,0.9832) | | 2 | (-104.776,-8.97805,477.848) | (-0.115,0.932,0.343) | | 3 | (42.1502,30.0269,-490.498) | (-0.639,0.563,0.523) | | 4 | (1.04046,76.2637,-520.018) | (0.374,-0.015,0.927) | | 5 | (-46.613,90.6838,-531.539) | (0.400,0.111,0.909) |
|
查看原文
表 5精度与处理时间的比较
Table5. Comparison of accuracy and processing time
| Number | Accuracy (D=60.002 mm) /mm | Processing time /s |
|---|
| MEMS | Kinect | DLP | MEMS | Kinect | DLP |
|---|
| 1 | 60.132 | 61.98 | 60.022 | 0.42 | 0.33 | 2.54 | | 2 | 60.114 | 62.106 | 60.041 | 0.39 | 0.33 | 2.31 | | 3 | 60.143 | 62.43 | 60.018 | 0.48 | 0.33 | 2.63 | | 4 | 60.986 | 61.87 | 60.035 | 0.44 | 0.33 | 2.50 | | 5 | 60.132 | 62.73 | 60.029 | 0.40 | 0.33 | 2.47 | | Mean | 0.1274 | 2.212 | 0.027 | 0.43 | 0.33 | 2.49 |
|
查看原文
黄会明, 刘桂华, 段康容. 基于微振镜结构光投射器的机器人抓取[J]. 中国激光, 2019, 46(2): 0204002. Huiming Huang, Guihua Liu, Kangrong Duan. Robot Bin-Picking Based on Micro-Electro Mechnical System Structure Light Projector[J]. Chinese Journal of Lasers, 2019, 46(2): 0204002.





 PDF全文
PDF全文

