红外与激光工程, 2020, 49 (4): 0413002, 网络出版: 2020-05-27
激光测距仪与相机信息融合过程中位姿标定方法  下载: 545次
下载: 545次
Calibration method of laser range finder and camera in information fusion process
图 & 表
图 1. (a) 激光测距仪和相机标定示意图 ,(b) 激光与相机坐标轴之间的角度
Fig. 1. (a) Laser range finder and camera calibration diagram, (b) Angle between laser and camera axes
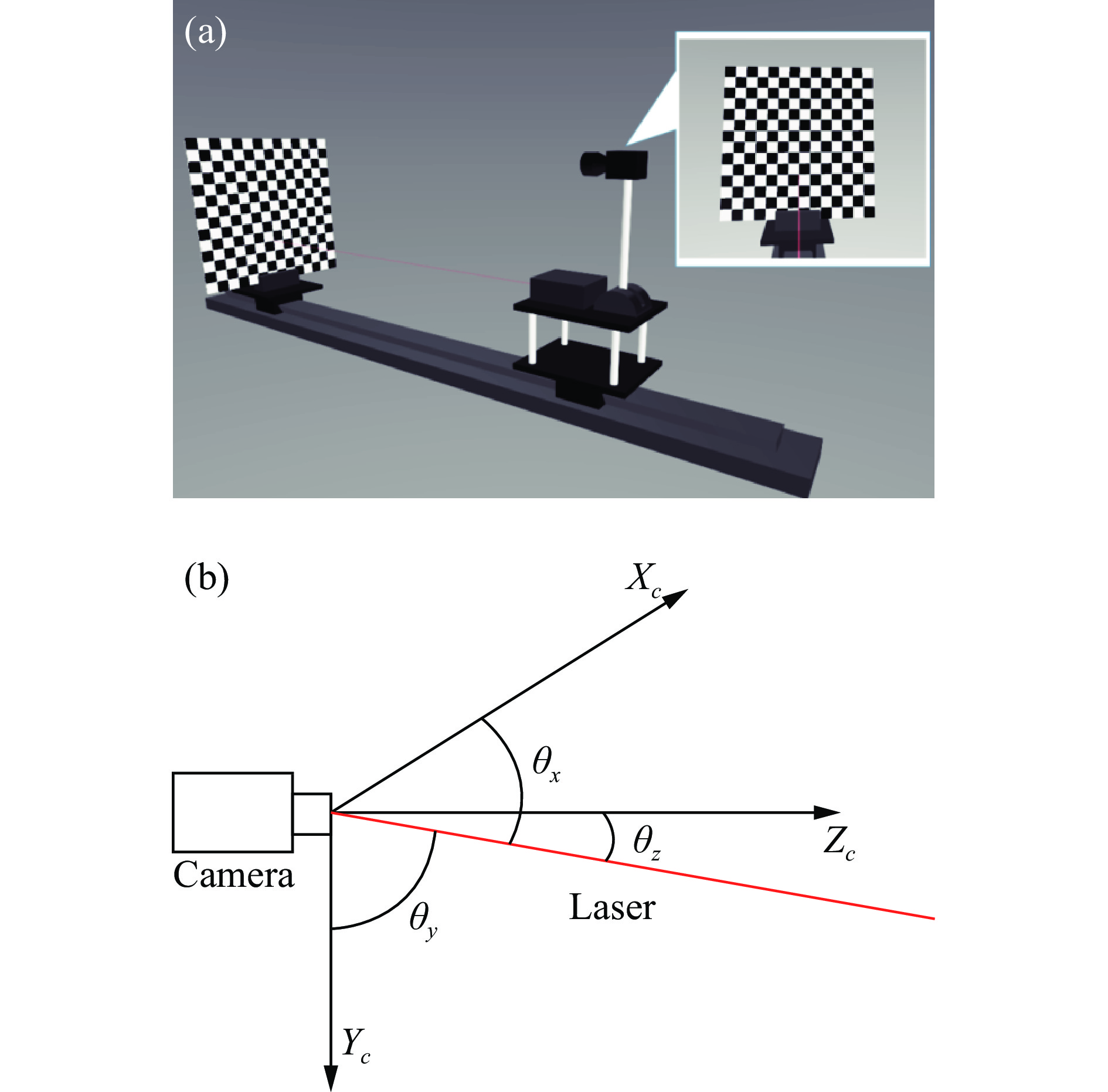

图 5. 不可见的激光光斑落在不同姿态的棋盘上
Fig. 5. Invisible laser spot falls on the chessboard in different postures
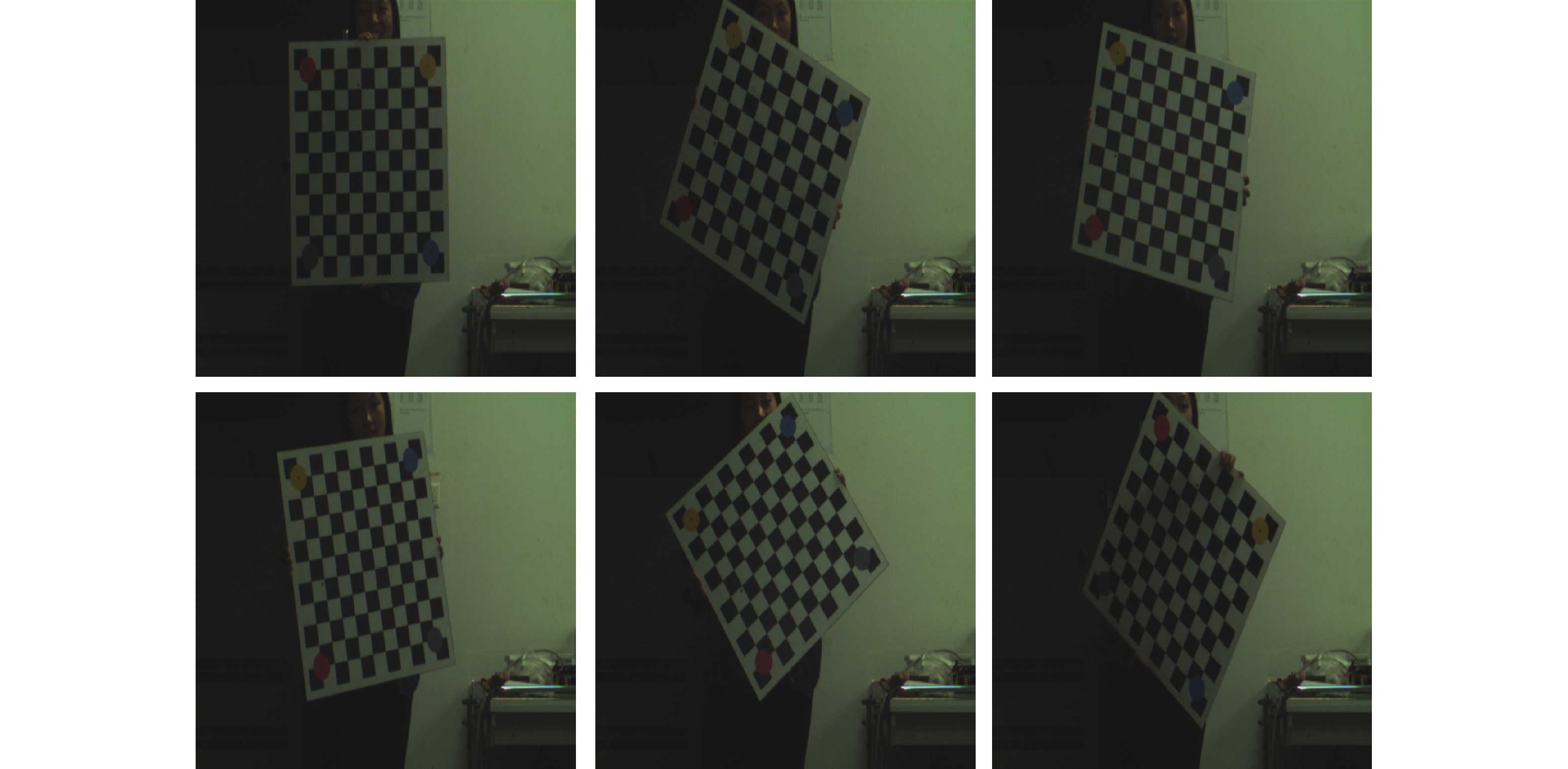
图 6. 激光光斑的实际位置和计算位置的比较。 (a)红色矩形是通过方法1计算的位置; (b)蓝色矩形是通过方法2计算的位置
Fig. 6. Comparison of the actual position and calculated position of the laser spot. (a) Red rectangle is the position calculated by method 1; (b) Blue rectangle is the position calculated by method 2
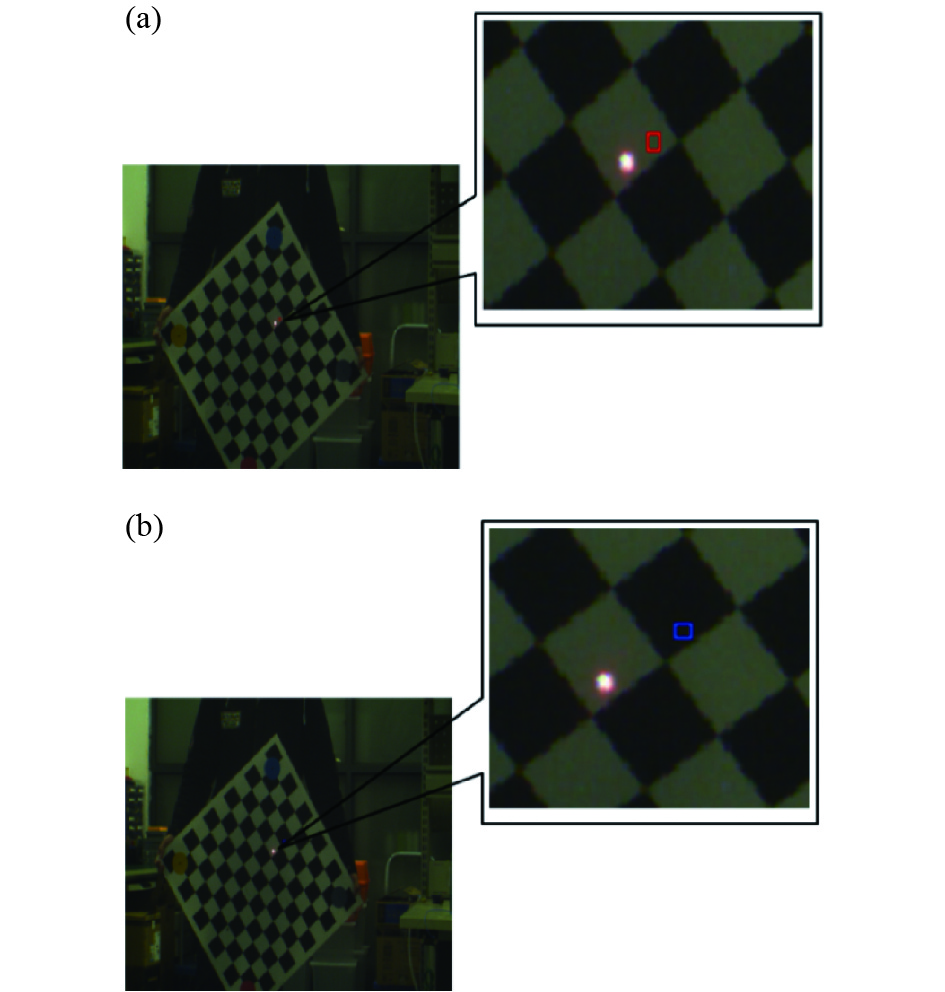
图 7. 方法1和方法2中不同数量的棋盘姿态的位置误差
Fig. 7. Position error of different number of checkerboard postures in methods 1 and 2
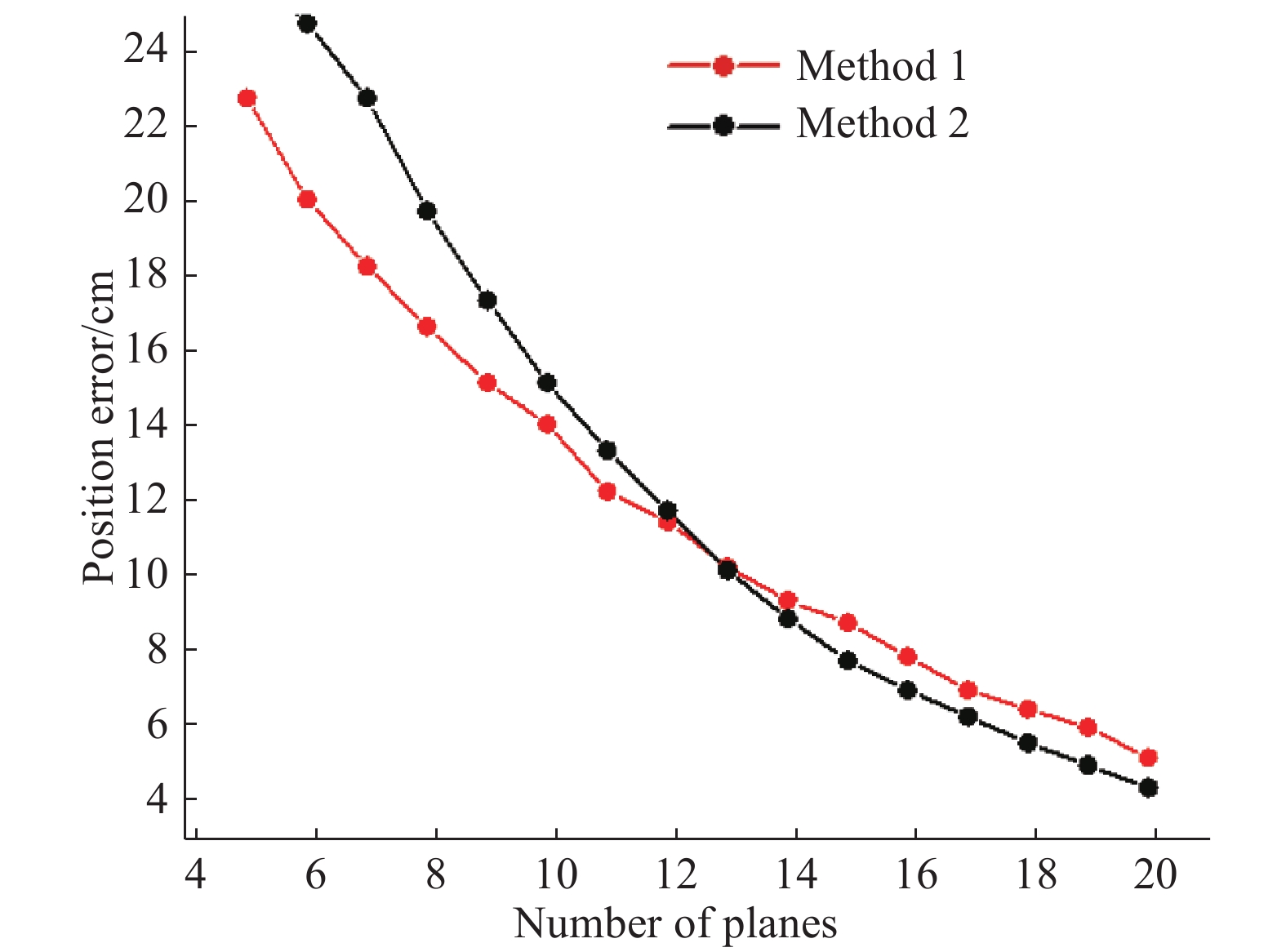
图 8. 方法1(上)和方法2(下)的位置误差分布
Fig. 8. Position error distribution for method 1 (top) and method 2 (bottom)
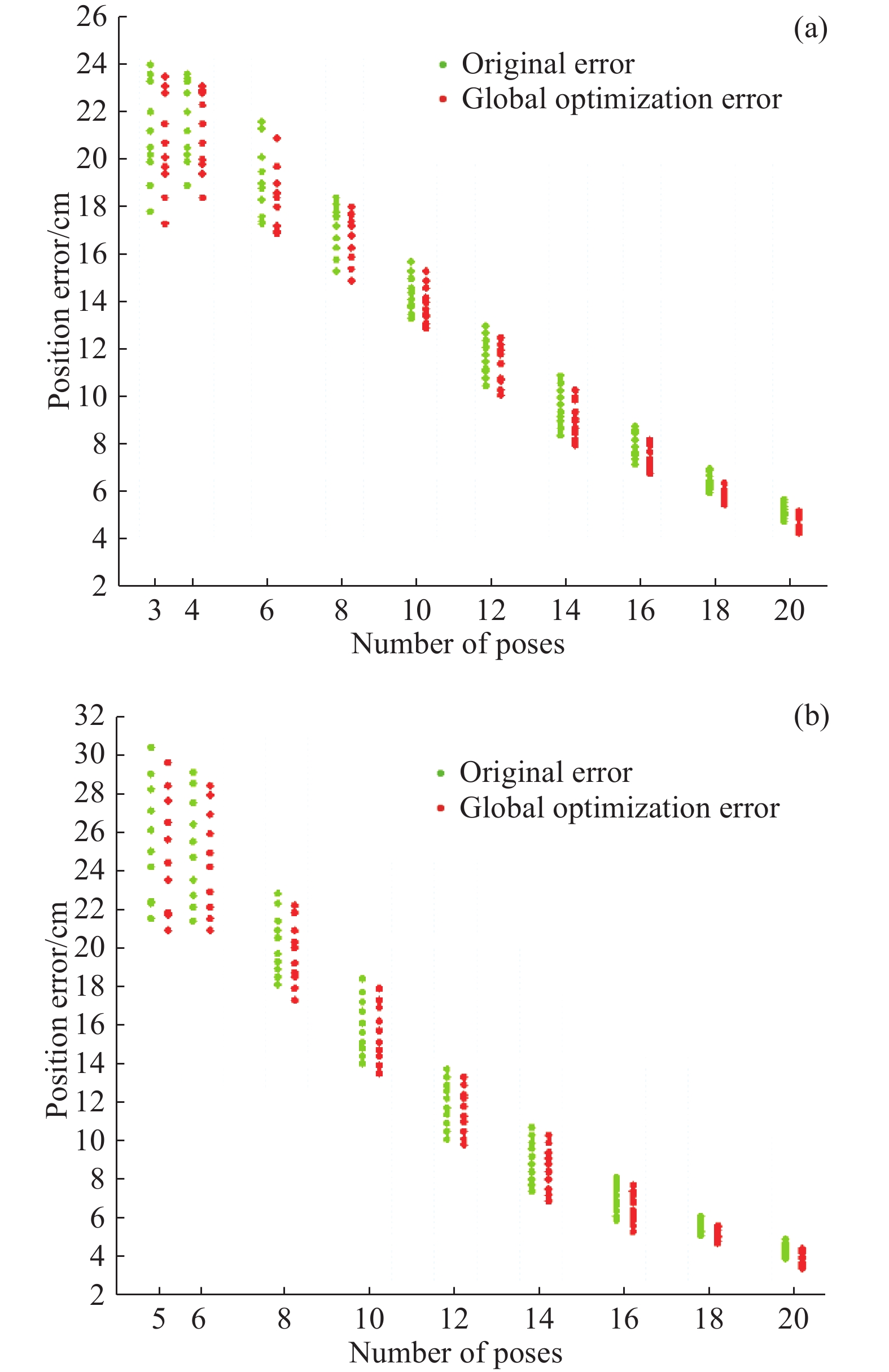
表 1棋盘平面的计算参数
Table1. Calculation parameters of the chessboard plane
|
表 2三种标定算法对比
Table2. Comparison of three calibration algorithms
|
王鹤, 李泽明. 激光测距仪与相机信息融合过程中位姿标定方法[J]. 红外与激光工程, 2020, 49(4): 0413002. He Wang, Zeming Li. Calibration method of laser range finder and camera in information fusion process[J]. Infrared and Laser Engineering, 2020, 49(4): 0413002.



 PDF全文
PDF全文
