基于关键点提取与优化迭代最近点的点云配准  下载: 1455次
下载: 1455次
Accurate Registration of 3D Point Clouds Based on Keypoint Extraction and Improved Iterative Closest Point Algorithm
1 武汉理工大学现代汽车零部件技术湖北省重点实验室, 湖北 武汉 430070
2 武汉理工大学汽车零部件技术湖北省协同创新中心, 湖北 武汉 430070
图 & 表
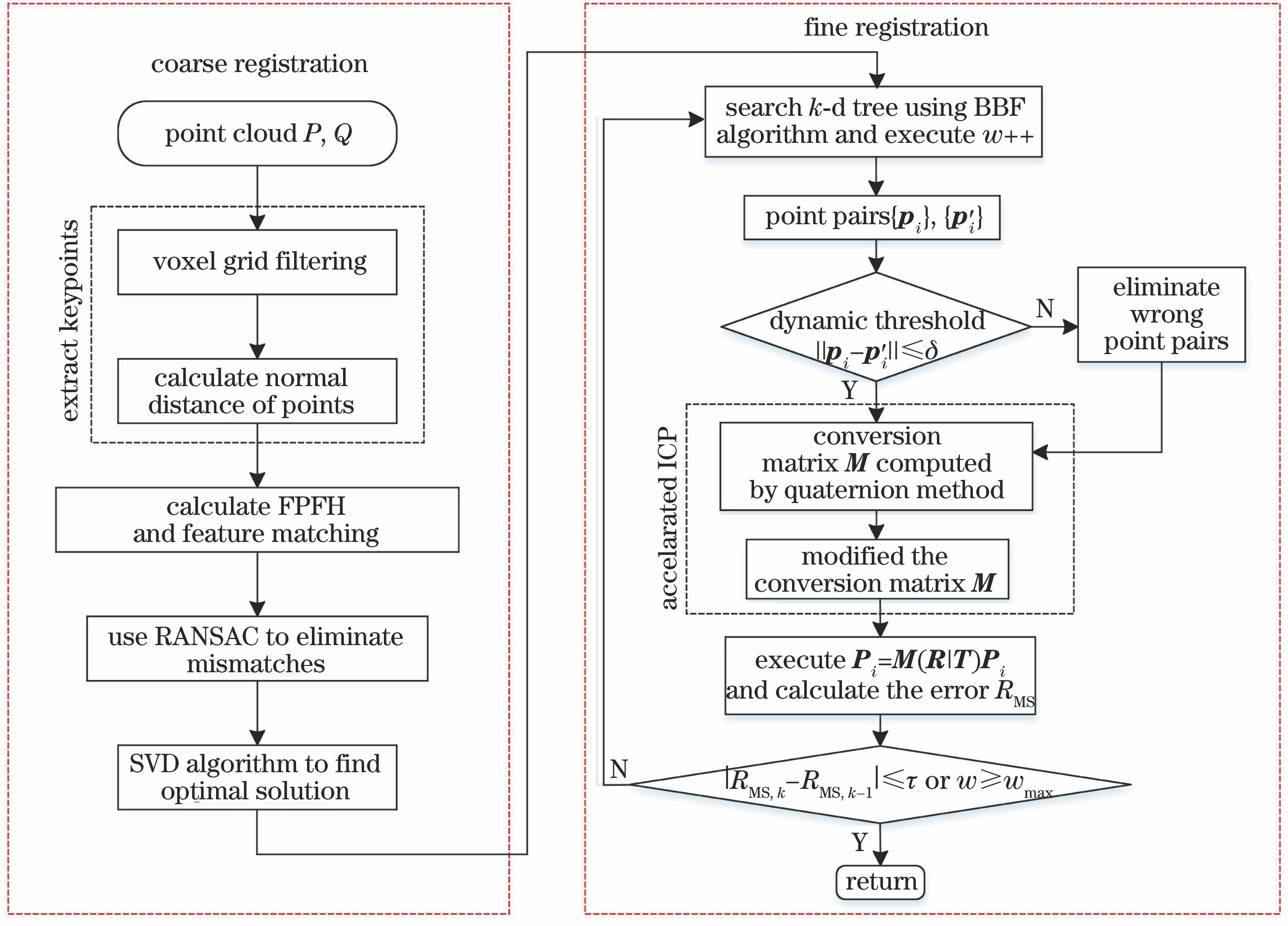
图 1. 点云P和Q配准的流程图
Fig. 1. Flowchart of registration of point clouds P and Q
下载图片 查看原文
图 2. 关键点提取。(a)体素格滤波;(b)法向距离提取关键点
Fig. 2. Keypoint extraction. (a)Voxel grid filtering; (b) extracting keypoints using normal distance
下载图片 查看原文
图 3. 不同参数下的关键点分布。(a) a0=0.3 mm, r=1.0 mm, thr=10%, m=5时,关键点数目为658;(b) a0=0.4 mm, r=2.0 mm, thr=10%, m=5时,关键点数目为597;(c) a0=0.4 mm, r=2.0 mm, thr=10%, m=10时,关键点数目为364
Fig. 3. Distribution of keypoints under different parameters. (a) a0=0.3 mm, r=1.0 mm, thr=10%, m=5, the number of keypoints is 658; (b) a0=0.4 mm, r=2.0 mm, thr=10%, m=5, the number of keypoints is 597; (c) a0=0.4 mm, r=2.0 mm, thr=10%, m=10, the number of keypoints is 364
下载图片 查看原文
图 4. 不同的最近点模型。(a)“点到点”模型;(b)“点到三角面”模型
Fig. 4. Different nearest point models. (a) “Point to point” model; (b) “point to triangle plane” model
下载图片 查看原文
图 5. 模型点云粗配准。(a)特征匹配;(b)优化RANSAC对误匹配剔除;(c)粗配准结果
Fig. 5. Coarse registration of model point clouds. (a) Feature matching; (b) correct correspondences after improved RANSAC; (c) results of coarse registration
下载图片 查看原文
图 6. 建筑物点云粗配准。(a)特征匹配;(b)优化RANSAC对误匹配剔除;(c)粗配准结果
Fig. 6. Coarse registration of building point clouds. (a) Feature matching; (b) correct correspondences after improved RANSAC; (c) results of coarse registration
下载图片 查看原文
图 7. 模型点云精配准。(a)所提算法的精配准结果;(b)精配准下点云距离偏差的色谱对比;(c)不同算法精配准误差的比较
Fig. 7. Fine registration of model point clouds. (a) Results of fine registration by proposed method; (b) chromatographic comparison of point clouds distance deviation under fine registration; (c) registration error comparison of fine registration among different methods
下载图片 查看原文
图 8. 建筑物点云精配准。(a)所提算法的精配准结果;(b)精配准下点云距离偏差的色谱对比;(c)不同算法配准精度误差的比较
Fig. 8. Fine registration of building point clouds. (a) Results of fine registration by proposed method; (b) chromatographic comparison of point clouds distance deviation under fine registration; (c) registration error comparison of fine registration among different methods
下载图片 查看原文
图 9. 不同算法的高斯噪声点云配准实验比较。(a) Bunny;(b) happy;(c) armadillo
Fig. 9. Registration experiment comparison of Gaussian noise point clouds under different methods. (a) Bunny; (b) happy; (c) armadillo
下载图片 查看原文
图 10. 所提算法在高斯噪声σ=0.02下对不同点云的配准结果。(a) Bunny;(b) happy;(c) armadillo
Fig. 10. Registration results of different point clouds with Gaussian noise σ=0.02 in proposed method. (a) Bunny; (b) happy; (c) armadillo
下载图片 查看原文
表 1模型点云粗配准结果
Table1. Coarse registration results of model point clouds
| Dataset | Size ofpoint cloud | Numberof keypoints | Number ofcorrespondences | Number of correctcorrespondenses | RMS/mm |
|---|
| Happy024Happy048 | 7558269158 | 433381 | 102 | 75 | 0.44 | | Dragon120Dragon144 | 2183323530 | 382411 | 80 | 53 | 1.04 | | Armadillo15Armadillo45 | 3220824813 | 405371 | 97 | 64 | 0.96 |
|
查看原文
表 2不同算法对模型点云粗配准结果的比较
Table2. Comparison of coarse registration results of model point clouds by different methods
| Method | Happy | Armadillo | Dragon |
|---|
| Time /s | RMS /mm | Time /s | RMS /mm | Time /s | RMS /mm |
|---|
| Uniform+FPFH+SAC-IA | 42.90 | 2.06 | 6.40 | 1.64 | 4.48 | 1.14 | | NARF+FPFH+SAC-IA | 28.67 | 2.18 | 16.40 | 1.76 | 8.43 | 1.91 | | ISS+FPFH+SAC-IA | 17.80 | 2.53 | 9.09 | 1.15 | 10.17 | 1.02 | | KFPCS | 6.70 | 1.29 | 3.28 | 1.03 | 2.71 | 1.09 | | Proposed method | 1.23 | 0.44 | 1.80 | 0.96 | 0.61 | 1.04 |
|
查看原文
表 3建筑物点云粗配准结果
Table3. Coarse registration results of building point clouds
| Dataset | Size ofpoint cloud | Number ofkeypoints | Number ofcorrespondences | Number of correctcorrespondences | RMS / (10-2 m) |
|---|
| Dagstuhl000Dagstuhl001 | 8135981360 | 453404 | 113 | 46 | 2.07 | | Hokuyo_0Hokuyo_1 | 370261370277 | 26953283 | 565 | 123 | 1.82 |
|
查看原文
表 4不同算法对建筑物点云粗配准结果比较
Table4. Comparison of coarse registration results of building point clouds by different methods
| Method | Dagstuhl | Hokuyo |
|---|
| Time /s | RMS /m | Time /s | RMS /m |
|---|
| Uniform+FPFH+SAC-IA | 27.20 | 0.0415 | 93.80 | 0.0267 | | NARF+FPFH+SAC-IA | 4.33 | 0.0360 | 63.70 | 0.0439 | | ISS+FPFH+SAC-IA | 12.04 | 0.0239 | 77.40 | 0.0206 | | KFPCS | 5.23 | 0.0249 | 29.70 | 0.0279 | | Proposed method | 0.72 | 0.0207 | 12.09 | 0.0182 |
|
查看原文
表 5不同算法模型点云精配准结果比较
Table5. Comparison of fine registration results of model point clouds under different methods
| Method | Happy | Armadillo | Dragon |
|---|
| Time /s | RMS /mm | Time /s | RMS /mm | Time /s | RMS /mm |
|---|
| Standard ICP | 18.90 | 0.082 | 7.60 | 0.170 | 5.80 | 0.230 | | GICP | 32.23 | 0.055 | 15.10 | 0.091 | 11.50 | 0.167 | | LM-ICP | 20.24 | 0.079 | 6.97 | 0.150 | 10.17 | 0.183 | | NDT | 5.30 | 0.087 | 2.35 | 0.150 | 1.69 | 0.180 | | Proposed method | 11.2 | 0.053 | 6.47 | 0.084 | 4.70 | 0.173 |
|
查看原文
表 6不同算法建筑物点云精配准结果比较
Table6. Comparison of fine registration results of building point clouds by different methods
| Method | Dagstuhl | Hokuyo |
|---|
| Time /s | RMS /(10-3 m) | Time /s | RMS /(10-3 m) |
|---|
| Standard ICP | 15.70 | 4.77 | 105.6 | 2.82 | | GICP | 23.97 | 4.31 | 121.7 | 2.43 | | LM-ICP | 60.60 | 4.52 | 203.6 | 4.56 | | NDT | 10.67 | 5.73 | 49.6 | 2.57 | | Proposed method | 13.60 | 3.58 | 70.9 | 1.61 |
|
查看原文
彭真, 吕远健, 渠超, 朱大虎. 基于关键点提取与优化迭代最近点的点云配准[J]. 激光与光电子学进展, 2020, 57(6): 061002. Zhen Peng, Yuanjian Lü, Chao Qu, Dahu Zhu. Accurate Registration of 3D Point Clouds Based on Keypoint Extraction and Improved Iterative Closest Point Algorithm[J]. Laser & Optoelectronics Progress, 2020, 57(6): 061002.













 PDF全文
PDF全文

