基于二维激光多普勒测速仪建立新组合导航系统的方法  下载: 811次
下载: 811次
Method for Establishing New Integrated Navigation System Based on Two-Dimensional Laser Doppler Velocimeter
1 南京理工大学机械工程学院, 江苏 南京 210094
2 国防科技大学前沿交叉学科学院, 湖南 长沙 410073
图 & 表
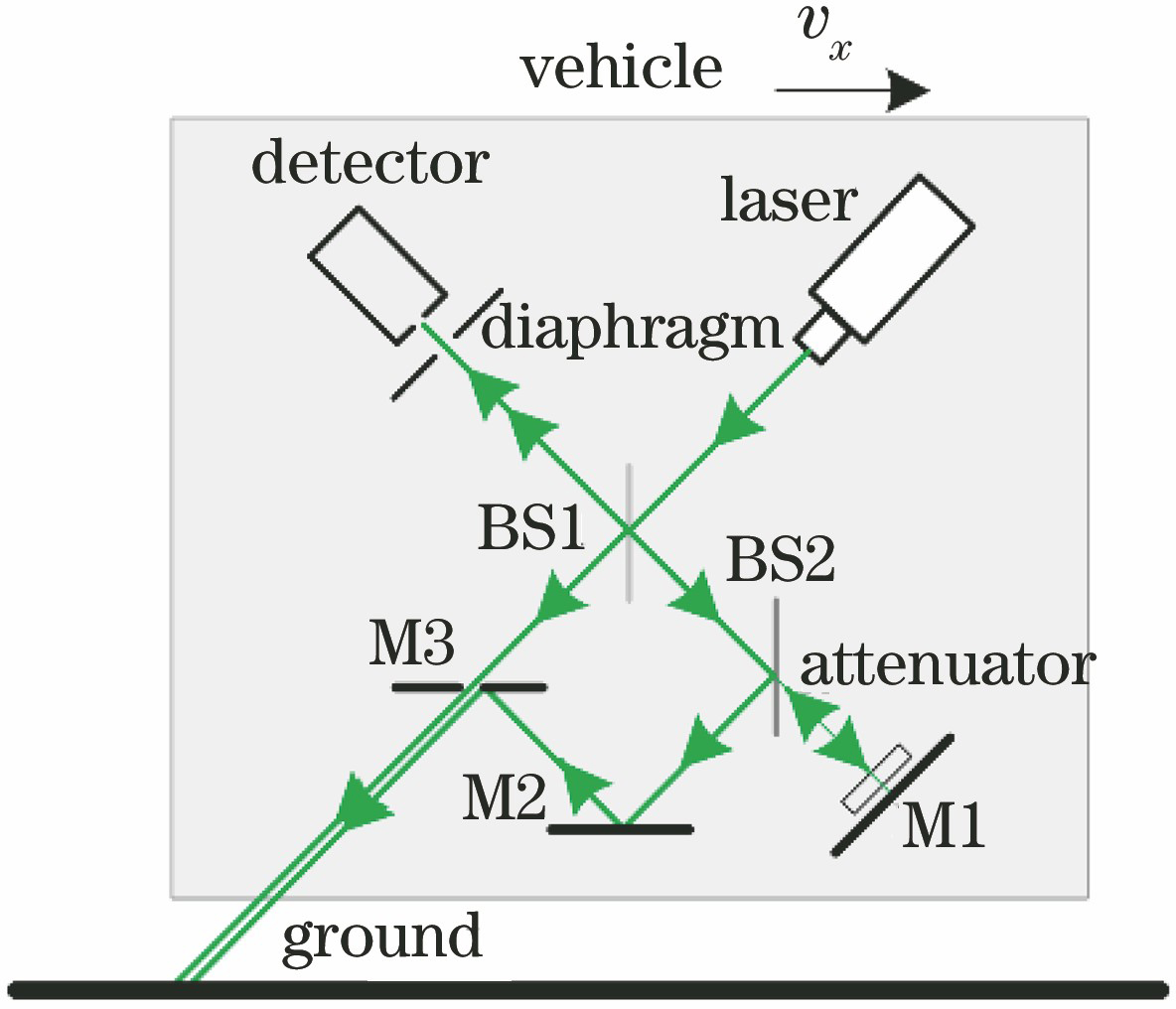
图 1. 1D LDV光路布置
Fig. 1. Optical arrangement of 1D LDV
下载图片 查看原文
图 2. 2D LDV的光路布置
Fig. 2. Optical arrangement of 2D LDV
下载图片 查看原文
图 3. LDV/SINS组合导航系统的结构图
Fig. 3. Structure of LDV/SINS integrated navigation system
下载图片 查看原文
图 4. 两个子系统的速度测量结果。(a)子系统1;(b)子系统2
Fig. 4. Speed measurement results of two subsystems. (a) Subsystem 1; (b) subsystem 2
下载图片 查看原文
图 5. 实验照片
Fig. 5. Photo of the experiment
下载图片 查看原文
图 6. 车辆的行驶路径
Fig. 6. Operating path of the vehicle
下载图片 查看原文
图 7. 2D LDV子系统的输出速度曲线
Fig. 7. Output velocity curves of the subsystems of 2D LDV
下载图片 查看原文
图 8. 纯SINS水平位置误差曲线
Fig. 8. Error curve of horizontal position of single SINS
下载图片 查看原文
图 9. 2D LDV/SINS组合系统的第一次测量结果。 (a)水平位置误差曲线;(b)高度位置误差曲线
Fig. 9. First results of 2D LDV/SINS integrated system. (a) Error curve of horizontal position; (b) error curve of height position
下载图片 查看原文
图 10. 2D LDV/SINS组合系统的第二次测量结果。(a)水平位置误差曲线;(b)高度位置误差曲线
Fig. 10. Second results of 2D LDV/SINS integrated system. (a) Error curve of horizontal position; (b) error curve of height position
下载图片 查看原文
表 12D LDV的主要性能参数
Table1. Main performance parameters of the 2D LDV
| Parameter | Value |
|---|
| Relative accuracy of velocitymeasurement (1σ ) /% | Probe 1 | 0.043 | | Probe 2 | 0.046 | | Range of velocity measurement /(km·h-1) | 0.1--120 | | Data update rate /Hz | 100 | | Installation distance /m | <1.5 | | Wavelength of laser /nm | 532 | | Inclination angle of the probes /(°) | 75 |
|
查看原文
厉文涛, 聂晓明, 周健. 基于二维激光多普勒测速仪建立新组合导航系统的方法[J]. 中国激光, 2020, 47(3): 0310001. Li Wentao, Nie Xiaoming, Zhou Jian. Method for Establishing New Integrated Navigation System Based on Two-Dimensional Laser Doppler Velocimeter[J]. Chinese Journal of Lasers, 2020, 47(3): 0310001.













 PDF全文
PDF全文

