面向动态场景的语义视觉里程计  下载: 788次
下载: 788次
Semantic-Based Visual Odometry Towards Dynamic Scenes
贵州大学大数据与信息工程学院, 贵州 贵阳 550025
图 & 表
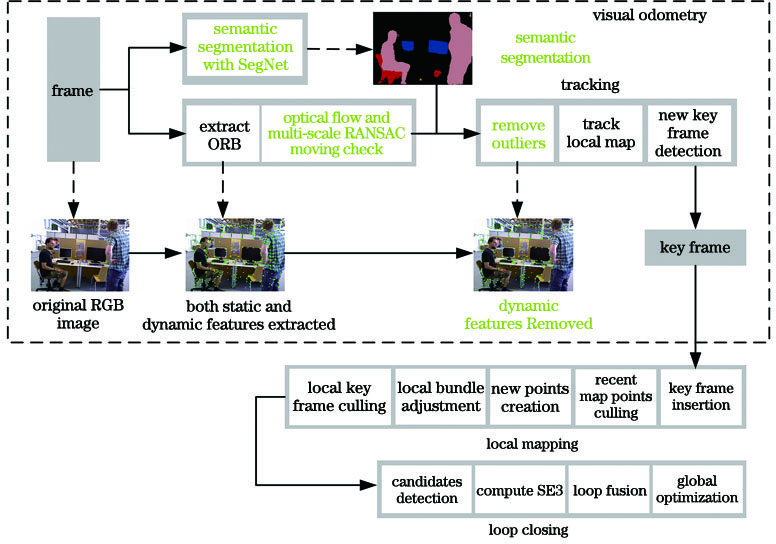
图 1. 本文视觉里程计的系统结构
Fig. 1. System structure of proposed visual odometry
下载图片 查看原文
图 2. SegNet网络架构
Fig. 2. Network architecture of SegNet
下载图片 查看原文
图 3. 语义分割效果。(a) 原图;(b) 分割结果
Fig. 3. Results of semantic segmentation. (a) Original image; (b) segmentation result
下载图片 查看原文
图 4. 不同尺度RANSAC的效果对比。(a)尺度为1和0.3,内点数量为238;(b)尺度为1和0.2,内点数量为210;(c)尺度为1和0.1,内点数量为159;(d)尺度为0.1,内点数量为168
Fig. 4. RANSAC effect comparison under different scales. (a) Scale is 1 and 0.3, number of inliers is 238; (b) scale is 1 and 0.2, number of inliers is 210; (c) scale is 1 and 0.1, number of inliers is 159; (d) scale is 0.1, number of inliers is 168
下载图片 查看原文
图 5. 对极几何约束。(a)p2位于极线L2上;(b)p2不严格位于极线L2上
Fig. 5. Epipolar geometric constraints. (a) p2 is on the polar line L2; (b) p2 is not strictly on the polar line L2
下载图片 查看原文
图 6. 外点剔除。(a)提取了所有的特征点;(b)剔除了位于人体身上的外点
Fig. 6. Outliers removing. (a) All feature points are extracted; (b) outliers lie on people are removed
下载图片 查看原文
图 7. 绝对路径轨迹误差对比。(a)ORB-SLAM2;(b)本文方案
Fig. 7. Comparison of ATE. (a) ORB-SLAM2; (b) proposed scheme
下载图片 查看原文
图 8. 相对平移误差对比。(a)ORB-SLAM;(b)本文方案
Fig. 8. Comparison of relative translation error. (a) ORB-SLAM2; (b) proposed scheme
下载图片 查看原文
表 1绝对路径轨迹误差典型值
Table1. Typical value of ATE
| Sequency | ORB-SLAM2 /m | Proposed /m | Improvement /% |
|---|
| RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. |
|---|
| wX | 0.565505 | 0.528696 | 0.515921 | 0.200691 | 0.019148 | 0.015891 | 0.013613 | 0.010682 | 96.61 | 96.99 | 97.36 | 94.68 | | wH | 0.327989 | 0.275986 | 0.232572 | 0.177225 | 0.028845 | 0.024179 | 0.020507 | 0.015730 | 91.21 | 91.24 | 91.18 | 91.12 | | wR | 0.817879 | 0.695593 | 0.642242 | 0.430206 | 0.407781 | 0.352362 | 0.270319 | 0.205247 | 50.14 | 49.34 | 57.91 | 52.29 | | wS | 0.409268 | 0.369913 | 0.293660 | 0.175114 | 0.007302 | 0.006431 | 0.006031 | 0.003459 | 98.22 | 98.26 | 97.95 | 98.02 | | sX | 0.009275 | 0.007939 | 0.007251 | 0.004796 | 0.009962 | 0.008540 | 0.007845 | 0.005129 | -7.41 | -7.57 | -8.19 | -6.94 | | sH | 0.027882 | 0.024288 | 0.022784 | 0.013692 | 0.014589 | 0.012853 | 0.011611 | 0.006902 | 47.68 | 47.08 | 49.04 | 49.59 | | sR | 0.021513 | 0.016177 | 0.011756 | 0.014181 | 0.016531 | 0.012956 | 0.009905 | 0.010268 | 23.16 | 19.91 | 15.75 | 27.59 | | sS | 0.007698 | 0.006775 | 0.006045 | 0.003655 | 0.006142 | 0.005233 | 0.004683 | 0.003216 | 20.21 | 22.76 | 22.53 | 12.01 |
|
查看原文
表 2相对平移误差典型值
Table2. Typical value of relative translation error
| Sequency | ORB-SLAM2 /m | Proposed /m | Improvement /% |
|---|
| RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. |
|---|
| wX | 0.825981 | 0.692976 | 0.648657 | 0.449478 | 0.028086 | 0.023557 | 0.020073 | 0.015293 | 96.60 | 96.60 | 96.91 | 96.60 | | wH | 0.502363 | 0.403237 | 0.436454 | 0.299615 | 0.040362 | 0.035091 | 0.032131 | 0.019942 | 91.97 | 91.30 | 92.64 | 93.34 | | wR | 1.212279 | 1.006164 | 0.943469 | 0.676205 | 0.138982 | 0.087917 | 0.042314 | 0.102784 | 88.54 | 91.26 | 95.52 | 84.80 | | wS | 0.585281 | 0.403727 | 0.157596 | 0.423743 | 0.010569 | 0.009465 | 0.008933 | 0.004703 | 98.19 | 97.66 | 94.33 | 98.89 | | sX | 0.013602 | 0.011845 | 0.010865 | 0.006688 | 0.014602 | 0.012807 | 0.011729 | 0.007015 | -7.35 | -8.12 | -7.95 | -4.89 | | sH | 0.040732 | 0.033476 | 0.028965 | 0.023205 | 0.020813 | 0.018533 | 0.016983 | 0.009471 | 48.90 | 44.64 | 41.37 | 59.19 | | sR | 0.030898 | 0.025071 | 0.020812 | 0.018059 | 0.024480 | 0.020617 | 0.017343 | 0.013200 | 20.77 | 17.77 | 16.67 | 26.91 | | sS | 0.012007 | 0.010637 | 0.009772 | 0.005570 | 0.009133 | 0.008002 | 0.007147 | 0.004403 | 23.94 | 24.77 | 26.86 | 20.95 |
|
查看原文
表 3相对旋转误差典型值
Table3. Typical value of relative rotation error
| Sequency | ORB-SLAM2 /(°) | Proposed /(°) | Improvement /% |
|---|
| RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. |
|---|
| wX | 14.812930 | 12.411189 | 11.075135 | 8.086117 | 0.717936 | 0.554291 | 0.449855 | 0.456282 | 95.15 | 95.53 | 95.94 | 94.36 | | wH | 13.379170 | 11.226538 | 14.220488 | 7.277847 | 0.930220 | 0.806664 | 0.727123 | 0.463252 | 93.05 | 92.81 | 94.89 | 93.63 | | wR | 22.021472 | 17.877791 | 16.175450 | 12.858064 | 2.780387 | 1.798397 | 0.922173 | 2.013343 | 87.37 | 89.94 | 94.30 | 84.34 | | wS | 10.334787 | 7.085263 | 1.830560 | 7.523754 | 0.286392 | 0.257924 | 0.242004 | 0.124482 | 97.23 | 96.36 | 86.78 | 98.35 | | sX | 0.578052 | 0.494635 | 0.422254 | 0.299133 | 0.590790 | 0.509834 | 0.442760 | 0.298500 | -2.20 | -3.07 | -4.86 | 0.21 | | sH | 1.030726 | 0.924055 | 0.857998 | 0.456638 | 0.716727 | 0.644671 | 0.600926 | 0.313205 | 30.46 | 30.23 | 29.96 | 31.41 | | sR | 0.882169 | 0.767921 | 0.700110 | 0.434188 | 0.755252 | 0.670573 | 0.623672 | 0.347473 | 14.39 | 12.68 | 10.92 | 19.97 | | sS | 0.336292 | 0.303505 | 0.286266 | 0.144834 | 0.316251 | 0.283073 | 0.264374 | 0.141012 | 5.96 | 6.73 | 7.65 | 2.64 |
|
查看原文
表 4绝对运动轨迹误差典型值
Table4. Typical value of ATE
| Sequency | DS-SLAM /m | Proposed /m | Improvement /% |
|---|
| RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. |
|---|
| wX | 0.022180 | 0.016869 | 0.013272 | 0.014402 | 0.019148 | 0.015891 | 0.013613 | 0.010682 | 13.67 | 5.80 | -2.57 | 25.83 | | wH | 0.032083 | 0.026748 | 0.022648 | 0.017715 | 0.028845 | 0.024179 | 0.020507 | 0.015730 | 10.09 | 9.60 | 9.45 | 11.21 | | wR | 0.433820 | 0.368918 | 0.249150 | 0.228252 | 0.407781 | 0.352362 | 0.270319 | 0.205247 | 6.00 | 4.49 | -8.50 | 10.08 | | wS | 0.007709 | 0.006979 | 0.006576 | 0.003275 | 0.007302 | 0.006431 | 0.006031 | 0.003459 | 5.28 | 7.85 | 8.29 | -5.62 | | sX | 0.010339 | 0.008831 | 0.007981 | 0.005377 | 0.009962 | 0.008540 | 0.007845 | 0.005129 | 3.65 | 3.30 | 1.70 | 4.61 | | sH | 0.014816 | 0.013229 | 0.011732 | 0.006672 | 0.014589 | 0.012853 | 0.011611 | 0.006902 | 1.53 | 2.84 | 1.03 | -3.45 | | sR | 0.020242 | 0.015779 | 0.011601 | 0.012680 | 0.016531 | 0.012956 | 0.009905 | 0.010268 | 18.33 | 17.89 | 14.62 | 19.02 | | sS | 0.006142 | 0.005233 | 0.004683 | 0.003216 | 0.006273 | 0.005461 | 0.004728 | 0.003085 | -2.13 | -4.36 | -0.96 | 4.07 |
|
查看原文
表 5相对平移误差典型值
Table5. Typical value of translation
| Sequency | DS-SLAM /m | Proposed /m | Improvement /% |
|---|
| RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. |
|---|
| wX | 0.032488 | 0.025585 | 0.020938 | 0.020022 | 0.028086 | 0.023557 | 0.020073 | 0.015293 | 13.55 | 7.93 | 4.13 | 23.62 | | wH | 0.045461 | 0.039412 | 0.035235 | 0.022658 | 0.040362 | 0.035091 | 0.032131 | 0.019942 | 11.22 | 10.96 | 8.81 | 11.99 | | wR | 0.148749 | 0.094158 | 0.045830 | 0.112832 | 0.138982 | 0.087917 | 0.042314 | 0.102784 | 6.57 | 6.63 | 7.67 | 8.91 | | wS | 0.010977 | 0.009989 | 0.009499 | 0.004552 | 0.010569 | 0.009465 | 0.008933 | 0.004703 | 3.72 | 5.25 | 5.96 | -3.32 | | sX | 0.014969 | 0.013095 | 0.012071 | 0.007252 | 0.014602 | 0.012807 | 0.011729 | 0.007015 | 2.45 | 2.20 | 2.83 | 3.27 | | sH | 0.021379 | 0.019180 | 0.017768 | 0.009444 | 0.020813 | 0.018533 | 0.016983 | 0.009471 | 2.65 | 3.37 | 4.42 | -0.29 | | sR | 0.028873 | 0.024268 | 0.020204 | 0.015643 | 0.024480 | 0.020617 | 0.017343 | 0.013200 | 15.21 | 15.04 | 14.16 | 15.62 | | sS | 0.009217 | 0.008144 | 0.007363 | 0.004316 | 0.009133 | 0.008002 | 0.007147 | 0.004403 | 0.91 | 1.74 | 2.93 | -2.02 |
|
查看原文
表 6相对旋转误差典型值
Table6. Typical value of rotation
| Sequency | DS-SLAM /(°) | Proposed /(°) | Improvement /% |
|---|
| RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. | RMSE | Mean | Median | S.D. |
|---|
| wX | 0.768973 | 0.583035 | 0.460229 | 0.501387 | 0.717936 | 0.554291 | 0.449855 | 0.456282 | 6.64 | 4.93 | 2.25 | 9.00 | | wH | 0.983289 | 0.862411 | 0.769254 | 0.472340 | 0.930220 | 0.806664 | 0.727123 | 0.463252 | 5.40 | 6.46 | 5.48 | 1.92 | | wR | 3.013413 | 1.909141 | 0.996452 | 2.320810 | 2.780387 | 1.798397 | 0.922173 | 2.013343 | 7.73 | 5.80 | 7.45 | 13.25 | | wS | 0.285163 | 0.261389 | 0.250628 | 0.113990 | 0.286392 | 0.257924 | 0.242004 | 0.124482 | -0.43 | 1.33 | 3.44 | -9.20 | | sX | 0.577467 | 0.493059 | 0.420298 | 0.300600 | 0.590790 | 0.509834 | 0.442760 | 0.298500 | -2.31 | -3.40 | -5.34 | 0.70 | | sH | 0.778858 | 0.698167 | 0.649726 | 0.345227 | 0.716727 | 0.644671 | 0.600926 | 0.313205 | 7.98 | 7.66 | 7.51 | 9.28 | | sR | 0.863546 | 0.760713 | 0.701008 | 0.408689 | 0.755252 | 0.670573 | 0.623672 | 0.347473 | 12.54 | 11.85 | 11.03 | 14.98 | | sS | 0.308551 | 0.276659 | 0.259871 | 0.136614 | 0.316251 | 0.283073 | 0.264374 | 0.141012 | -2.50 | -2.32 | -1.73 | -3.22 |
|
查看原文
表 7运动一致性检测时间消耗
Table7. Time consuming of moving consistency check
| Sequency | DS-SLAM /ms | Proposed /ms | Reduced /% |
|---|
| wX | 0.019487 | 0.013030 | 33.14 | | wH | 0.018344 | 0.010929 | 40.42 | | wR | 0.017183 | 0.010957 | 36.23 | | wS | 0.016712 | 0.015695 | 6.09 | | sX | 0.017424 | 0.014163 | 18.72 | | sH | 0.018717 | 0.013182 | 29.58 | | sR | 0.016412 | 0.011832 | 27.90 | | sS | 0.014110 | 0.013517 | 4.20 |
|
查看原文
卢金, 刘宇红, 张荣芬. 面向动态场景的语义视觉里程计[J]. 激光与光电子学进展, 2021, 58(6): 0611001. Lu Jin, Liu Yuhong, Zhang Rongfen. Semantic-Based Visual Odometry Towards Dynamic Scenes[J]. Laser & Optoelectronics Progress, 2021, 58(6): 0611001.











 PDF全文
PDF全文

