1 武汉科技大学 信息科学与工程学院,湖北 武汉 430080
2 武汉科技大学 冶金自动化与检测技术教育部工程研究中心,湖北 武汉 430080
针对传统SIFT匹配算法复杂、特征冗余点多、难以满足实时性等问题,本文提出了一种具有局部自适应阈值的SIFT快速图像匹配算法。首先,所提方法在SIFT算法的基础上,对构建的高斯金字塔进行了优化,通过减少金字塔层数来消除冗余特征点以提高检测效率,并根据图像局部对比度来自适应提取FAST算法中的阈值从而实现高质量的特征点检测,筛选出鲁棒性较强的特征点进行更准确的匹配;其次,采用高斯圆形窗口建立32维降维特征向量,提高算法运行效率;最后,根据匹配特征点对之间的几何一致性对特征点进行提纯,有效减少误匹配。实验结果表明,本文方法在匹配精度和运算效率方面的综合表现均优于SIFT算法及其他对比匹配算法,相比传统的SIFT算法,匹配精度提高了约10%,算法运行时间缩短了约49%。在图像发生尺度、旋转以及光照变化的情况下,正确匹配率在93%以上。
SIFT算法 高斯金字塔 自适应阈值 特征描述符 图像匹配 SIFT algorithm Gaussian pyramid adaptive thresholds feature descriptor image matching
1 西安理工大学 计算机科学与工程学院,陕西西安70048
2 陕西省网络计算与安全技术重点实验室,陕西西安710048
基于智能机器人代替人到各种复杂环境完成探测、防疫等大量应用的需求,场景的识别引起了研究者的广泛关注。场景识别的目的是通过提取和分析场景中的特征,获得场景的高层语义信息,从而推理出所处的具体位置,它是同步定位与建图系统(Simultaneous Localization and Mapping,SLAM)、自动驾驶、机器人导航、闭环检测的基础。三维扫描技术的快速发展使得人们能够利用各种扫描仪快速获取各类场景的点云数据。不论扫描时间、光照环境如何变化,点云场景所获取的几何信息都具有较好的不变性,因此,基于点云的场景识别成为计算机视觉领域的研究热点。本文首先对近年来面向点云数据的场景识别方法进行了归纳和总结;然后介绍用于场景识别的大规模室内/室外场景的数据集,以及用于算法评测的评价指标,同时总结了各类算法的识别率。最后指出面向点云的场景识别中所面临的问题和挑战,对未来的研究趋势进行展望。研究结果有助于相关领域学者快速全面地了解基于点云数据场景识别的研究现状,为进一步提升场景识别精度奠定基础。
点云 场景识别 特征描述符 深度学习 注意力机制 图卷积 point cloud scene recognition feature descriptor deep learning attention mechanism graph convolution 光学 精密工程
2022, 30(16): 1988
上海交通大学机械与动力工程学院, 上海 200240
为解决大型构件表面弱纹理特征的捕捉和多次测量的精度配准问题,采用集成结构光与光度立体视觉的复合测量系统,利用结构光测量获取工件表面整体形状的点云数据,利用光度立体视觉获取表面精细弱纹理的法向量信息。在此基础上,提出了一种融合邻域点云坐标与法向量信息的新型局部特征描述子,可对弱纹理工件表面特征进行有效且鲁棒地描述。大量仿真和真实实验验证了所提方法的有效性,其性能大幅超越了基于传统特征描述子的迭代最近点算法。所提方法可有效捕捉并描述弱纹理表面的丰富细节特征,构建鲁棒显著的特征描述子,进而大幅提升了测量结果的匹配精度,减小了大型复杂构件的整体重建误差。
图像处理 点云拼接 特征描述子 大尺度测量 光度立体视觉 条纹投影轮廓术
1 武汉科技大学 信息科学与工程学院, 湖北 武汉 430081
2 冶金自动化与检测技术教育部工程中心, 湖北 武汉 430000
针对Receptive Fields Network(RF-Net)中存在网络较浅、缺乏深层语义信息的问题, 提出了一种基于Residual Network(ResNet)和RF-Net的改进网络用于遥感影像匹配。首先, 通过对真实遥感影像进行裁剪、光照变换和仿射变换处理, 得到图像对并计算同一序列中不同图像间的单应性矩阵, 构建了一个遥感影像数据集。然后, 提出了一种双通道的网络结构用于关键点检测, 该双通道网络由Receptive Fields Detection(RF-Det)和ResNet构成, 前者提取含有细节信息的浅层特征图, 后者提取含有语义信息的深层特征图。此外, 采用特征描述子提取网络L2-Net, 得到128维特征向量用以描述关键点。最后, 分别采用最近邻、带阈值的最近邻和最近邻距离比的策略对特征描述子进行匹配。实验结果表明, 该网络在仅含光照变换、仅含仿射变换和同时包含这两种变换的遥感影像数据集上的匹配得分, 比RF-Net分别提高了0.002, 0.117, 0104, 在关键点检测和匹配精度方面具有更优的性能。
图像匹配 关键点检测 特征描述子提取 仿射变换 特征向量 image matching keypoints detection feature descriptor extraction affine transform feature vectors
辽宁工程技术大学电子与信息工程学院, 辽宁 葫芦岛 125105
提出融合梯度幅值(GM)和梯度发生率(GO)的新方法,构建了两种具有高分辨能力的新描述符。抑制归一化描述符通过对GM进行分段归一化,抑制较小的GM以构建新描述符;GM-GO融合描述符是通过抑制部分GO(其对应的GM较小)、再将GM和GO进行融合的新描述符,可提高描述符的可分辨性。实验结果表明,在噪声和光照等环境的影响下,提出的两种方法都具有更高的匹配精度。
图像处理 图像匹配 梯度信息 特征描述符 可分辨性 激光与光电子学进展
2020, 57(14): 141022
1 北京交通大学计算机与信息技术学院, 北京 100044
2 轨道工程北京市重点实验室, 北京 100044
3 交通数据分析与挖掘北京市重点实验室, 北京 100044
点云的边缘是将点云模型转换为高质量曲面或实体模型的重要中间特征。为了有效地提取点云边缘,针对现有点云边缘检测算法设置统一邻域值或邻域半径造成的边缘检测不准确的问题,提出一种基于局部边缘特征描述子的自适应边缘检测算法。首先定义法向量特征模型,引入法向量变化率,基于法向量变化率提出邻域自适应方法;然后结合点云局部区域的曲率密度,定义局部边缘特征描述子;最后根据特征描述子取值符合高斯分布的特点自动调整阈值,解决了对于不同的点云模型需要人工调参的问题。通过在多种不同的点云数据集上进行实验,证明了该算法可以在保持模型原始信息的前提下,准确地提取模型的边缘信息,具有可重复性和一定的鲁棒性。
机器视觉 点云 边缘 自适应 特征描述子
Author Affiliations
Abstract
1 State Key Laboratory of Pulsed Power Laser Technology, National University of Defense Technology, Hefei 230037, China
2 Anhui Provincial Key Laboratory of Electronic Restriction, National University of Defense Technology, Hefei 230037, China
3 The Military Representative Bureau of the Ministry of Equipment Development, Central Military Commission in Beijing, Beijing 100191, China
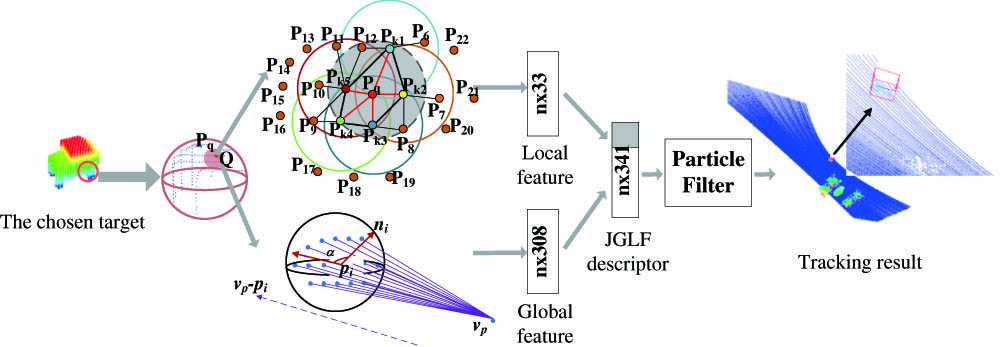
To fully describe the structure information of the point cloud when the LIDAR-object distance is long, a joint global and local feature (JGLF) descriptor is constructed. Compared with five typical descriptors, the object recognition rate of JGLF is higher when the LIDAR-object distances change. Under the situation that airborne LIDAR is getting close to the object, the particle filtering (PF) algorithm is used as the tracking frame. Particle weight is updated by comparing the difference between JGLFs to track the object. It is verified that the proposed algorithm performs 13.95% more accurately and stably than the basic PF algorithm.
object tracking LIDAR global and local feature descriptor point cloud Chinese Optics Letters
2020, 18(6): 061001
1 沈阳航空航天大学,a.航空航天工程学部
2 沈阳航空航天大学,b.自动化学院, 沈阳 110136
基于单目视觉的机器人同步定位与地图创建 (SLAM)方法是实现机器人自主行走的重要研究方向之一, 而图像特征匹配技术是该方法中的关键技术。基于尺度不变特征变换(SIFT)算法的SLAM匹配方法具有提取特征点数量丰富、稳定等优点, 然而在速度以及正确率方面仍存在一些不足。因此针对SIFT算法描述子维数高、匹配时间长等问题, 提出了一种改进的SIFT算法, 将原128维的特征描述子降至内部矩形外部圆形的24维特征描述子, 匹配过程中应用了三线性插值、RANSAC算法等对匹配结果去除误匹配。实验结果最终表明, 改进后的SIFT算法不仅对角度变化、光照变化等情况均具有良好的鲁棒性, 匹配速度和正确率也有显著提升, 可满足实时SLAM同步地图构建的需要。
图像匹配 单目视觉 尺度不变特征变换 特征描述子 RANSAC算法 image matching monocular vision scale-invariant feature transformation feature descriptor RANSAC algorithm
1 江南大学物联网工程学院, 江苏 无锡 214122
2 新疆大学电气工程学院, 新疆 乌鲁木齐 830047
为了准确地描述人体骨骼的运动细节以及3D骨骼间的几何关系,提出一种基于四元数3D骨骼表示的人体行为识别方法。首先,在已捕获的关键帧集合的基础上,对普通关键帧和变速关键帧分别采用线性插值和二次多项式插值,获得相同帧数的骨骼序列;然后,针对所得的骨骼序列,采用四元数对每帧中3D骨骼间的几何关系进行描述,获得四元数骨骼特征描述子;最后,采用支持向量机分类器对这一系列特征描述子进行训练和测试,得到最终的识别结果。在3个标准数据库上的实验结果均显示,四元数骨骼特征描述子对噪声、运动速度变化、视角变化和时域不对齐都具有很好的稳健性,可以显著提高人体行为识别的准确率。
图像处理 人体行为识别 四元数特征描述子 关键帧 动态时间规整算法 支持向量机 激光与光电子学进展
2018, 55(2): 021002
合肥工业大学计算机与信息学院, 合肥 230009
本文提出了一种基于 RANSAC的 SIFT匹配优化。采用加权的圆形邻域替代原有 SIFT描述子矩形邻域, 使得描述子维度降低了 25%。根据特征点最近邻与次近邻的距离比越低, 其匹配正确率越高的特点, 对匹配点按最近邻比率高低进行匹配点排序, 并以最优匹配点作为简化的 RANSAC算法初始样本数据集, 用简化的 RANSAC算法进行几何校验, 进一步提纯匹配点。实验结果表明本文方法在匹配精度优于 RANSAC-SIFT的基础上, 匹配速度大约提高了 10倍。尤其当匹配点增多时, 本文方法在匹配速度上更加有优势。
尺度不变特征变换 随机抽样一致性 特征描述符 最近邻比率 SIFT RANSAC feature descriptor nearest neighbor ratio









