P4P法相机姿态标定精度分析  下载: 1701次
下载: 1701次
Analysis of Attitude Calibration Precision of P4P Camera
1 中国科学院大学, 北京 100049
2 中国科学院西安光学精密机械研究所光学定向与测量技术研究室, 陕西 西安 710119
图 & 表
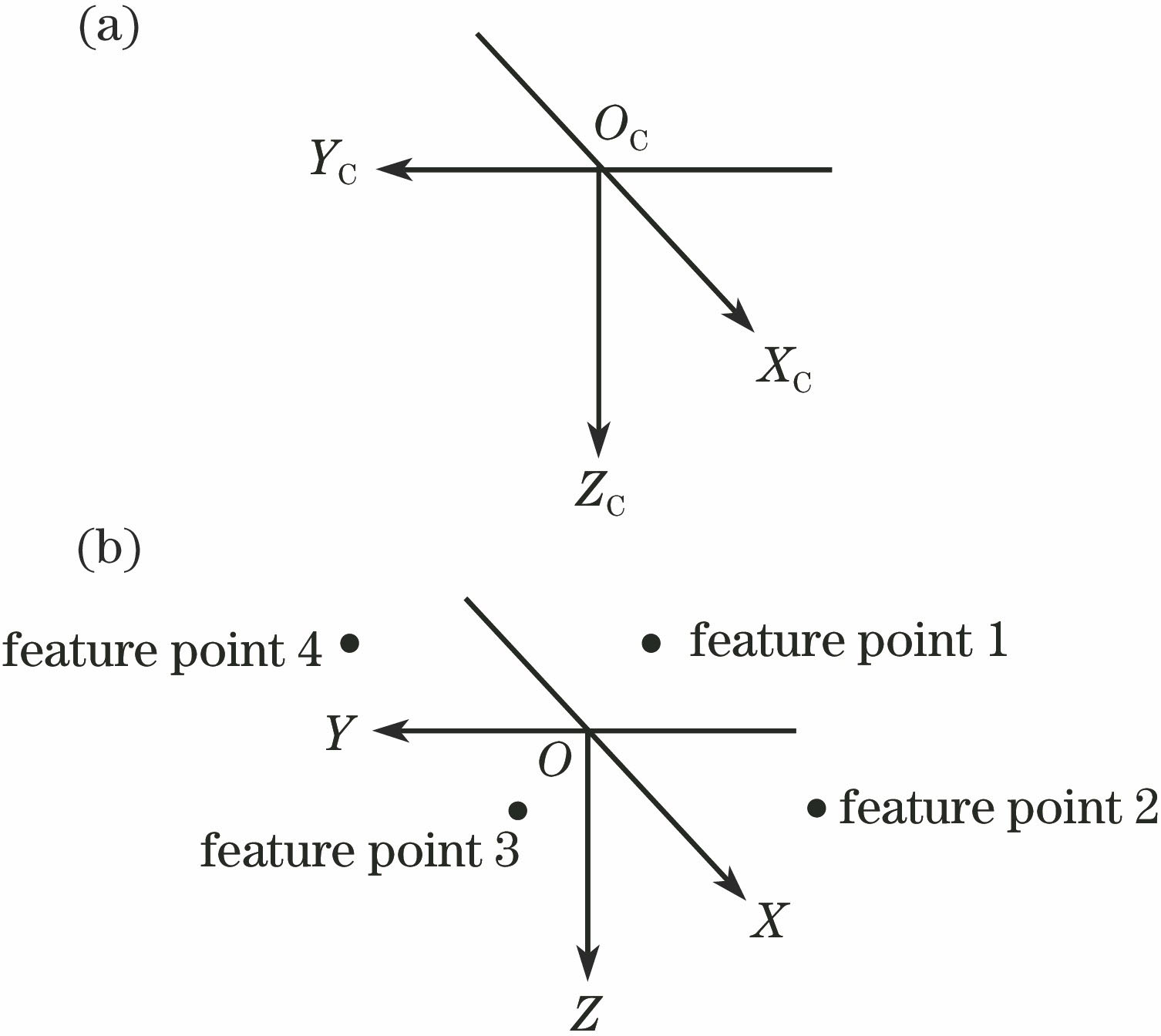
图 1. 坐标系定义。(a)相机坐标系;(b)靶标坐标系
Fig. 1. Definition of coordinate system. (a) Camera coordinate system; (b) target coordinate system
下载图片 查看原文
图 2. 实验平台
Fig. 2. Experimental platform
下载图片 查看原文
表 1系统参数输入
Table1. Input of system parameters
| Serial number | Item | Value |
|---|
| 1 | Coordinate of feature point 1 /mm | (-225,-225,0) | | 2 | Coordinate of feature point 2 /mm | (225,-225,0) | | 3 | Coordinate of feature point 3 /mm | (225,225,0) | | 4 | Coordinate of feature point 4 /mm | (-225,225,0) | | 5 | Focal length /mm | 35 | | 6 | Pixel size /(μm×μm) | 5.5×5.5 | | 7 | (CX,CY) /pixel | (1024.5,1024.5) | | 8 | Resolution of camera /(pixel×pixel) | 4096×4096 | | 9 | (TX,TY,TZ) /mm | (100,100,2000) |
|
查看原文
表 2误差源估计值
Table2. Estimate values of error sources
| Serial number | Item | Value |
|---|
| 1 | Errors of image orientations Δxni and Δ /pixel | 0.3 | | 2 | Aberration ΔxEi and Δ /% | 0.1 | | 3 | Error of principal point ΔCx and Δ /pixel | 10 | | 4 | Error of focal length ΔFx and ΔFy | 91 | | 5 | Errors of locations of feature points ΔXi and Δ /mm | 0.1 |
|
查看原文
表 3误差项
Table3. Error items(°)
| Error | Attitude |
|---|
| AZ | 0 | 5 | 5 | -5 | -5 | 30 | 30 | -30 | -30 |
|---|
| AX | 0 | 3 | -3 | 3 | -3 | 5 | -5 | 5 | -5 | | AY | 0 | 3 | 3 | -3 | -3 | 5 | 5 | -5 | -5 | | ΔAZ|n | | 0.0200 | 0.0201 | 0.0200 | 0.0202 | 0.0200 | 0.0301 | 0.0301 | 0.0305 | 0.0302 | | ΔAZ|E | | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | | ΔAZ|C | | 0 | -0.0047 | -0.0047 | 0.0047 | 0.0047 | -0.0079 | -0.0079 | 0.0079 | 0.0079 | | ΔAZ|F | | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | | ΔAZ|D | | 0.0106 | 0.0107 | 0.0106 | 0.0107 | 0.0106 | 0.0109 | 0.0109 | 0.0111 | 0.0110 | | ΔAZ | | 0.0226 | 0.0233 | 0.0231 | 0.0233 | 0.0231 | 0.0330 | 0.0330 | 0.0334 | 0.0331 |
|
查看原文
表 4测量结果
Table4. Results of measurements(°)
| Serial number | AX0 | AY0 | AZ0 | Measuring value AZ | ΔAZ |
|---|
| 1 | 0 | 0 | 0 | 0 | 0 | | 2 | 3 | 3 | 5 | 5.021 | 0.021 | | 3 | -3 | 3 | 5 | 4.982 | 0.018 | | 4 | 3 | -3 | -5 | -5.019 | 0.019 | | 5 | -3 | -3 | -5 | -4.980 | 0.020 | | 6 | 5 | 5 | 30 | 30.029 | 0.029 | | 7 | -5 | 5 | 30 | 29.972 | 0.028 | | 8 | 5 | -5 | -30 | -30.025 | 0.025 | | 9 | -5 | -5 | -30 | -29.972 | 0.028 |
|
查看原文
朱帆, 于芳苏, 吴易明, 郝冲. P4P法相机姿态标定精度分析[J]. 光学学报, 2018, 38(11): 1115005. Fan Zhu, Fangsu Yu, Yiming Wu, Chong Hao. Analysis of Attitude Calibration Precision of P4P Camera[J]. Acta Optica Sinica, 2018, 38(11): 1115005.




 PDF全文
PDF全文

