基于激光雷达回波强度的人工路标中心提取方法  下载: 1244次
下载: 1244次
Extraction Method of Artificial Landmark Center Based on Lidar Echo Intensity
1 北京万集科技股份有限公司, 北京 100193
2 武汉万集信息技术有限公司, 湖北 武汉 430074
图 & 表
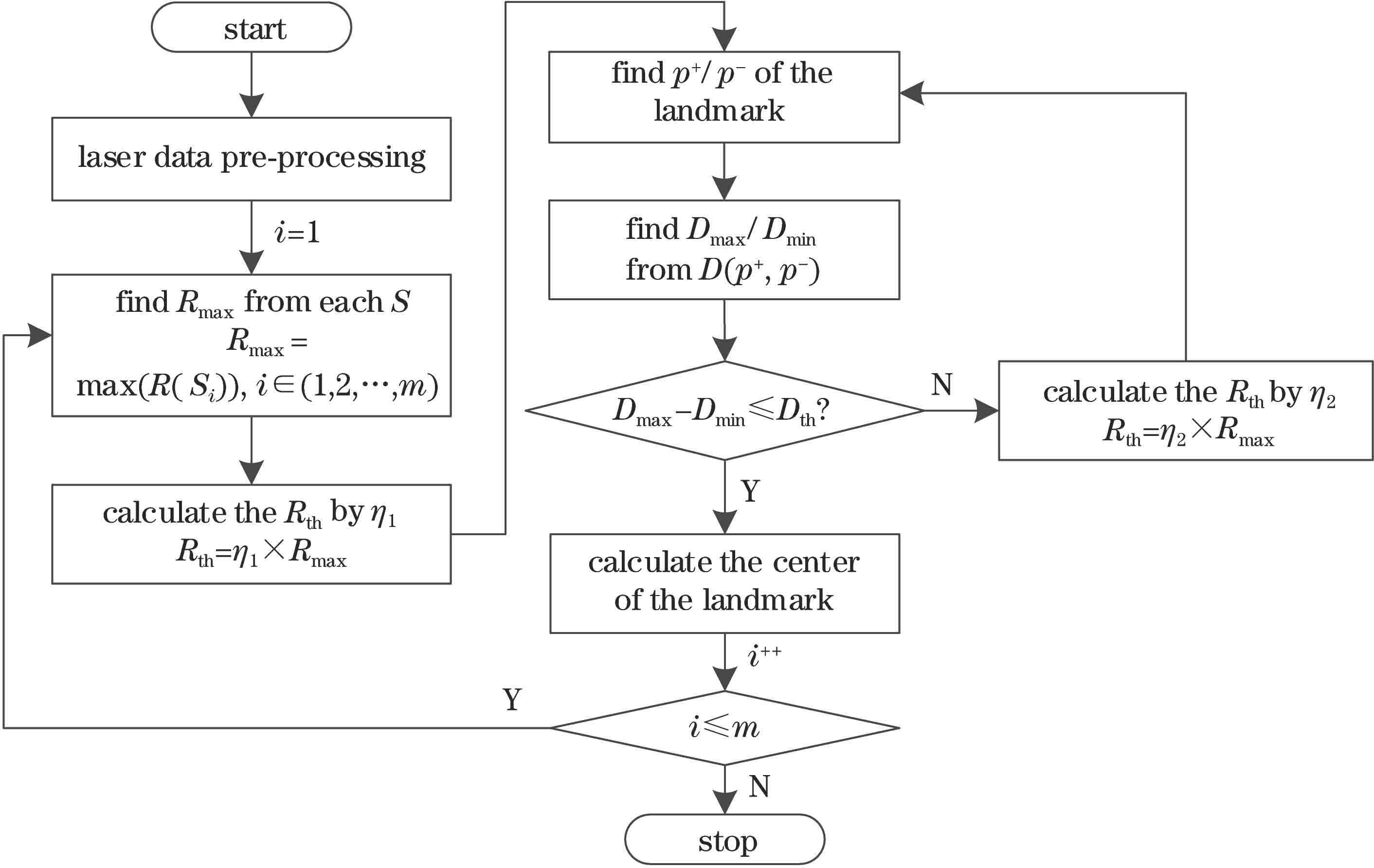
图 1. 路标中心识别算法流程图
Fig. 1. Flow chart of the landmark center recognition algorithm
下载图片 查看原文
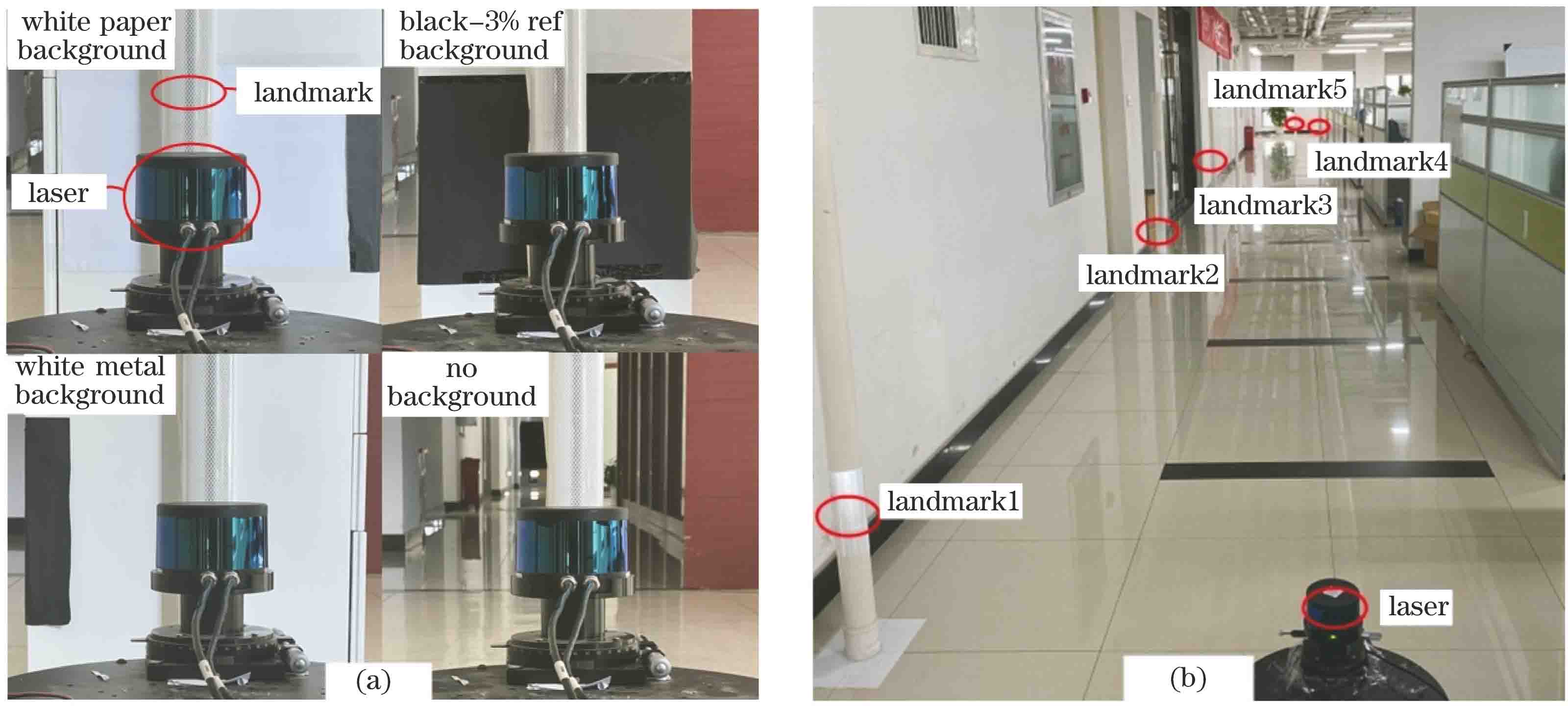
图 2. 实验平台与实验场景。(a)不同背景面实验场景;(b)算法准确性验证实验场景
Fig. 2. Experiment platform and experiment scene. (a) Different background plate experiment scenes; (b) experimental scene of algorithm accuracy verification
下载图片 查看原文
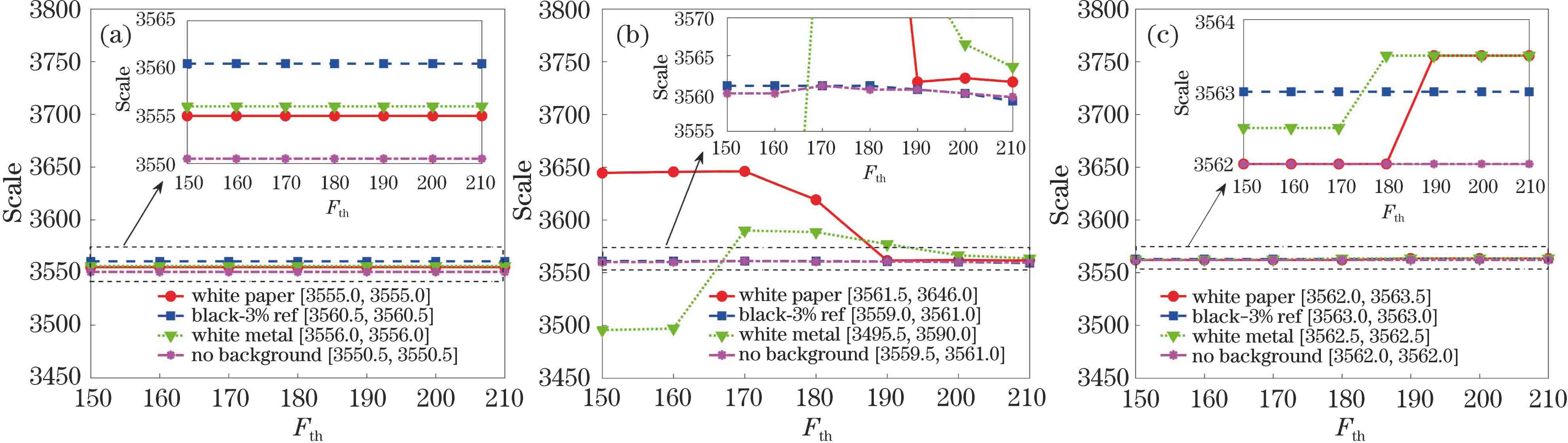
图 3. 0.5 m处路标中心识别结果。(a) Hough算法;(b)阈值切割算法;(c)本文算法
Fig. 3. Recognition results of landmark center at 0.5 m. (a) Hough algorithm; (b) threshold cutting algorithm; (c) modified algorithm
下载图片 查看原文
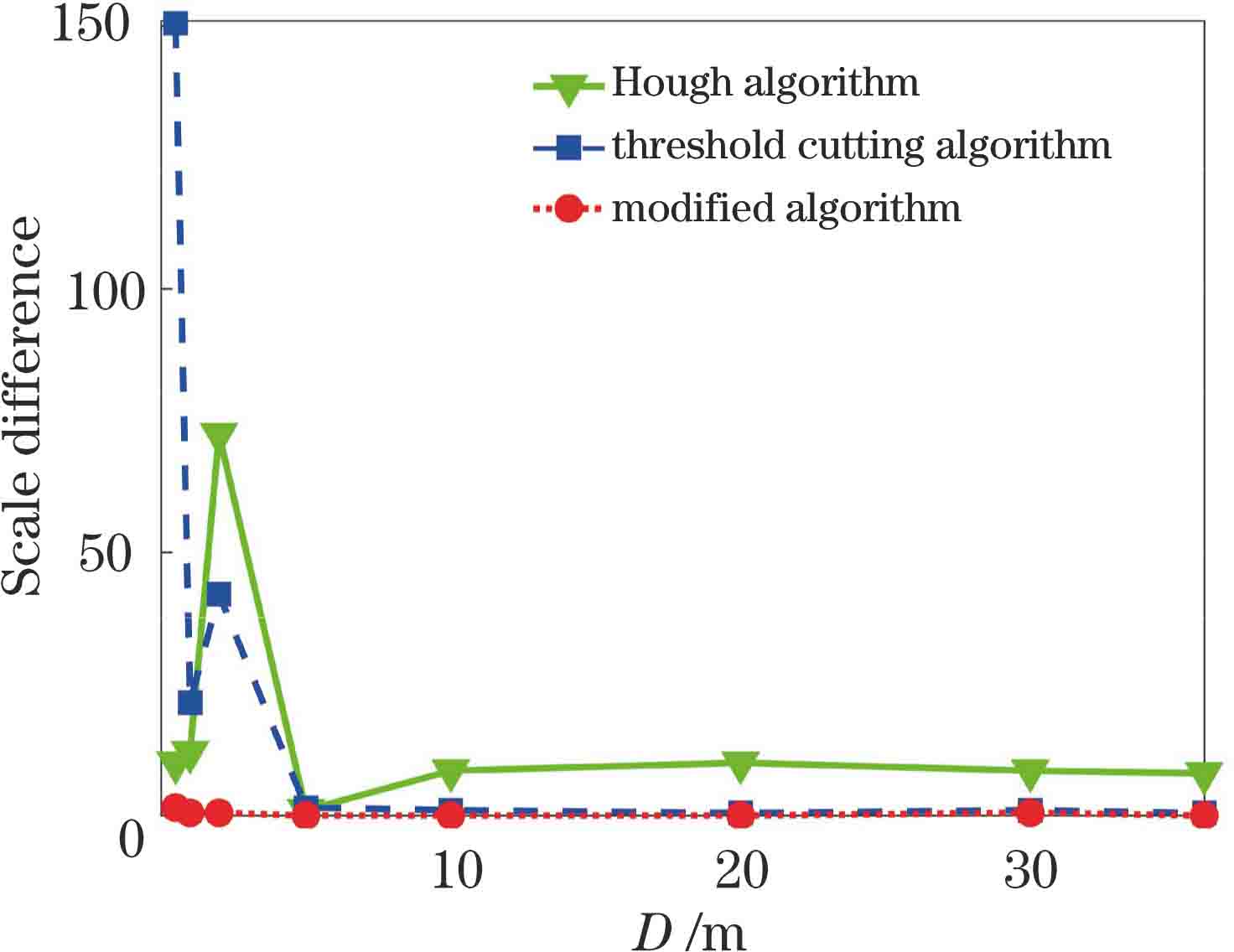
图 4. 不同距离时,三种算法中心识别的波动图
Fig. 4. Difference of three algorithms' recognition results under different distances
下载图片 查看原文
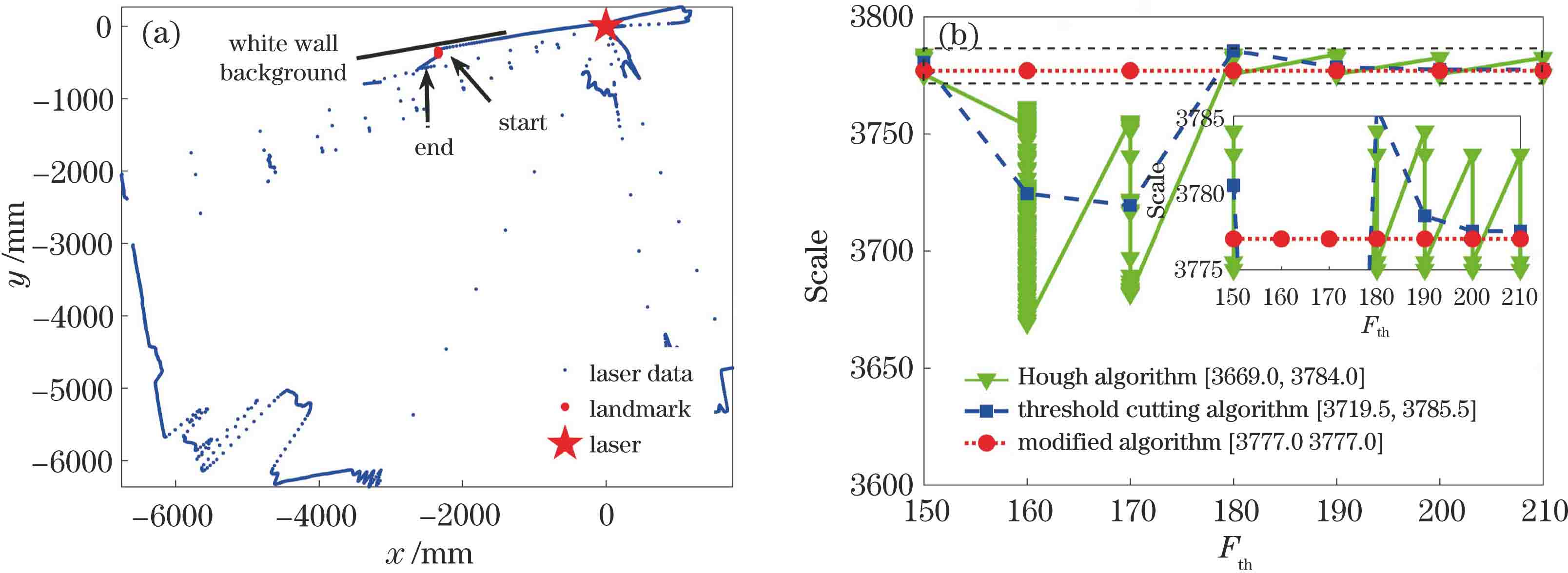
图 5. 大入射角时,激光雷达轮廓数据和路标中心识别结果。(a)激光雷达轮廓数据;(b)路标中心识别结果
Fig. 5. Laser scanning data and the recognition results of landmark center at large incidence angle. (a) Laser scanning data; (b) recognition result of landmark center
下载图片 查看原文
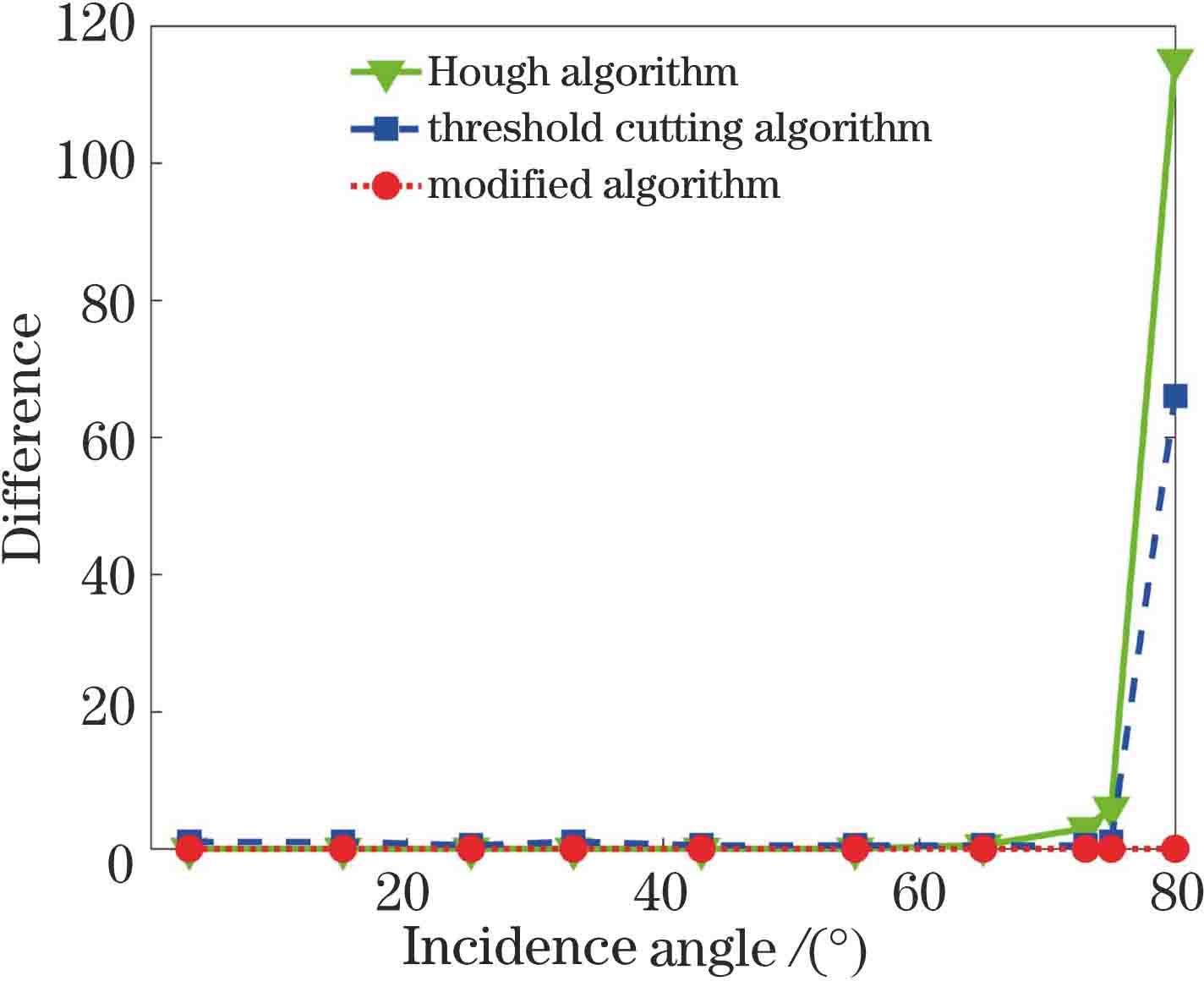
图 6. 不同入射角时,三种算法中心识别的波动图
Fig. 6. Difference of three algorithms' recognition results under different incidence angles
下载图片 查看原文
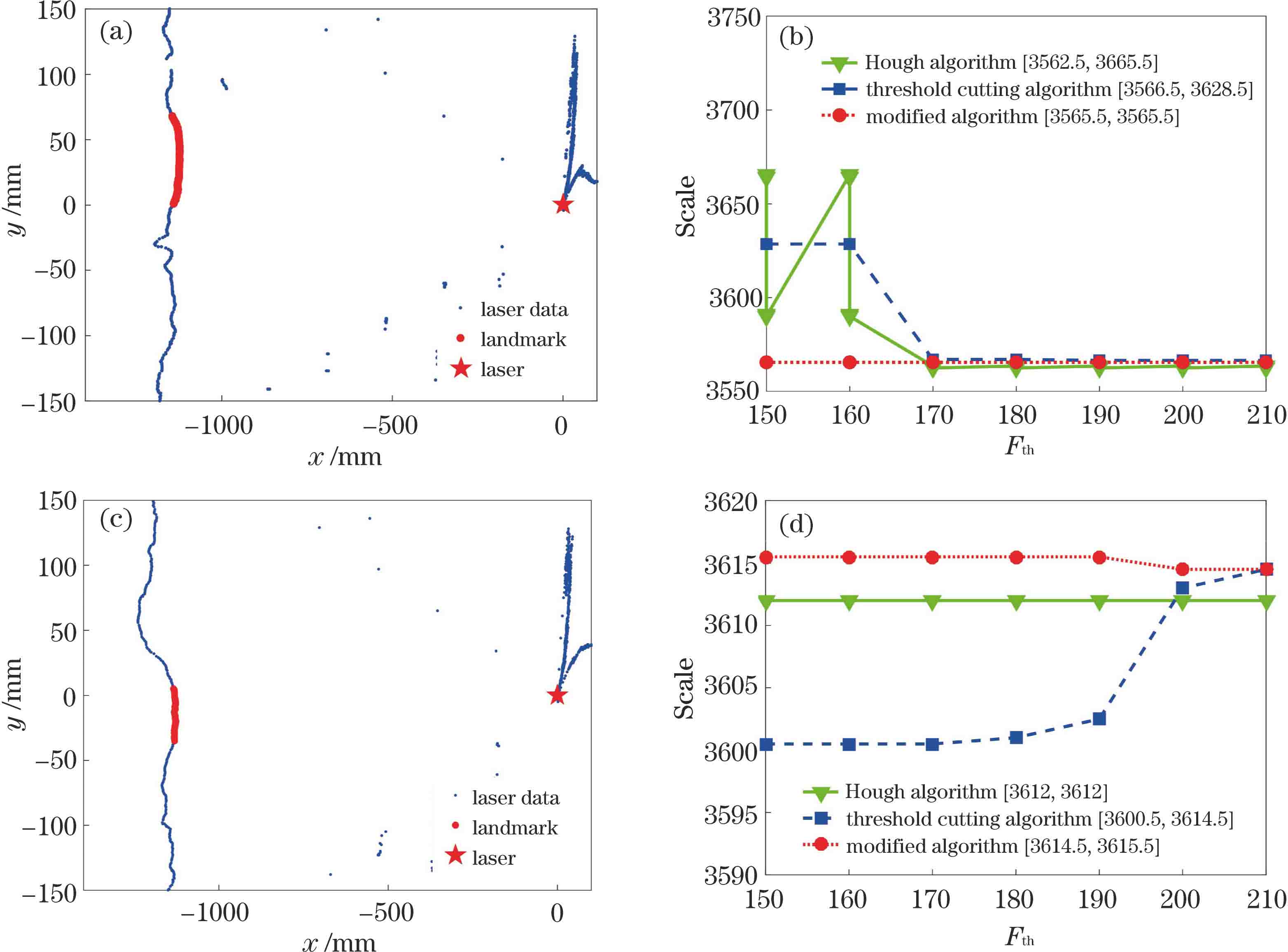
图 7. 玻璃为背景面时,激光雷达轮廓数据和路标中心识别结果。(a)(c)激光雷达轮廓数据;(b)(d)路标中心识别结果
Fig. 7. Laser scanning data and the recognition results of landmark center with glass as the background. (a)(c) Laser scanning data; (b)(d) recognition results of landmark center
下载图片 查看原文
表 1激光雷达参数表
Table1. Specification of lidar
| Parameter | Index |
|---|
| Source of data | VANJEE TEC WLR-712 | | Measurable distance for10% reflective surface | 50 m | | Measurement accuracy | Max: ±50 mm | | Scanning angle | 360° | | Angular resolution | 0.05°/0.1° | | Beam divergence | 5 mrad | | Scanning frequency | 8 Hz/16 Hz |
|
查看原文
表 2不同背景面反射率信息
Table2. Reflectivity of different background plates
| Background material | Reflectivity /% |
|---|
| White paper | 80--90 | | Black-3% ref | 3 | | White metal | <80 | | No background | 0 |
|
查看原文
表 3激光雷达不同位置时,本文算法识别路标中心原始数据
Table3. Original landmark center data identified by modified algorithm at different laser poses
| LandmarkNo. | Laser pose1 | Laser pose2 | Laser pose3 |
|---|
| X /mm | Y /mm | D /mm | X /mm | Y /mm | D /mm | X /mm | Y /mm | D /mm |
|---|
| 1 | 576 | 1178 | 1311 | 2861 | 1199 | 3102 | 8373 | 1203 | 8458 | | 2 | 5968 | 1173 | 6082 | 8266 | 1188 | 8350 | 13775 | 1192 | 13826 | | 3 | 11380 | 1178 | 11440 | 13669 | 1195 | 13721 | 19178 | 1199 | 19215 | | 4 | 22204 | -628 | 22212 | 24500 | -586 | 24507 | 30014 | -592 | 30019 | | 5 | 27617 | -38 | 27617 | 29914 | 5 | 29914 | 35425 | -1 | 35425 |
|
查看原文
表 4路标之间距离偏差
Table4. Distance error Lerr of two landmarks
| L | Lreal /mm | Laser pose 1 | Laser pose 2 | Laser pose 3 |
|---|
| Lcal /mm | Lerr /(mm per m) | Lcal /mm | Lerr /(mm per m) | Lcal /mm | Lerr /(mm per m) |
|---|
| L12 | 5400.0 | 5392.0 | 1.5 | 5405.0 | 0.9 | 5415.0 | 2.8 | | L13 | 10800.0 | 10804.0 | 0.4 | 10808.0 | 0.7 | 10815.0 | 1.4 | | L14 | 21674.9 | 21703.3 | 1.3 | 21712.5 | 1.7 | 21724.0 | 2.3 | | L15 | 27026.7 | 27068.3 | 1.5 | 27079.3 | 1.9 | 27085.7 | 2.2 | | L23 | 5400.0 | 5412.0 | 2.2 | 5403.0 | 0.6 | 5400.0 | 0.0 | | L24 | 16299.7 | 16335.6 | 2.2 | 16330.6 | 1.9 | 16332.7 | 2.0 | | L25 | 21633.3 | 21682.8 | 2.3 | 21680.3 | 2.2 | 21676.7 | 2.0 | | L34 | 10949.0 | 10973.6 | 2.3 | 10976.5 | 2.5 | 10982.7 | 3.1 | | L35 | 16244.4 | 16282.5 | 2.3 | 16288.5 | 2.7 | 16288.2 | 2.7 | | L45 | 5433.2 | 5445.1 | 2.2 | 5446.2 | 2.4 | 5443.4 | 1.9 |
|
查看原文
祖爽, 胡攀攀, 潘奇. 基于激光雷达回波强度的人工路标中心提取方法[J]. 中国激光, 2020, 47(8): 0810001. Zu Shuang, Hu Panpan, Pan Qi. Extraction Method of Artificial Landmark Center Based on Lidar Echo Intensity[J]. Chinese Journal of Lasers, 2020, 47(8): 0810001.



 PDF全文
PDF全文

