基于视觉的空间曲线机器人加工轨迹规划  下载: 1267次
下载: 1267次
Processing Trajectory Planning of Space Curved Robot Based on Vision
武汉纺织大学机械工程与自动化学院, 湖北 武汉 430073
图 & 表
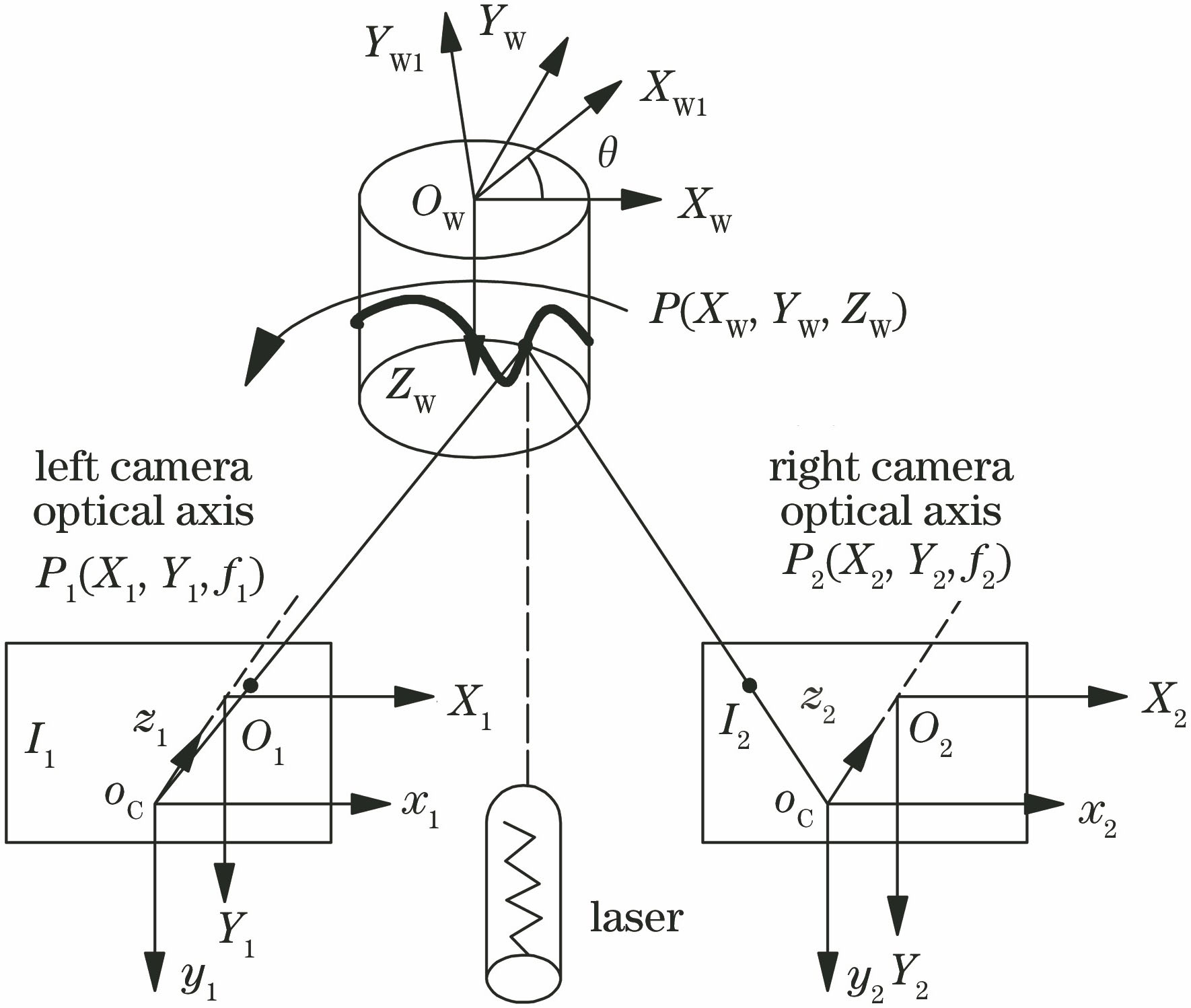
图 1. 双目相机全景视觉重构原理示意图
Fig. 1. Schematic diagram of panoramic vision reconstruction of binocular camera
下载图片 查看原文
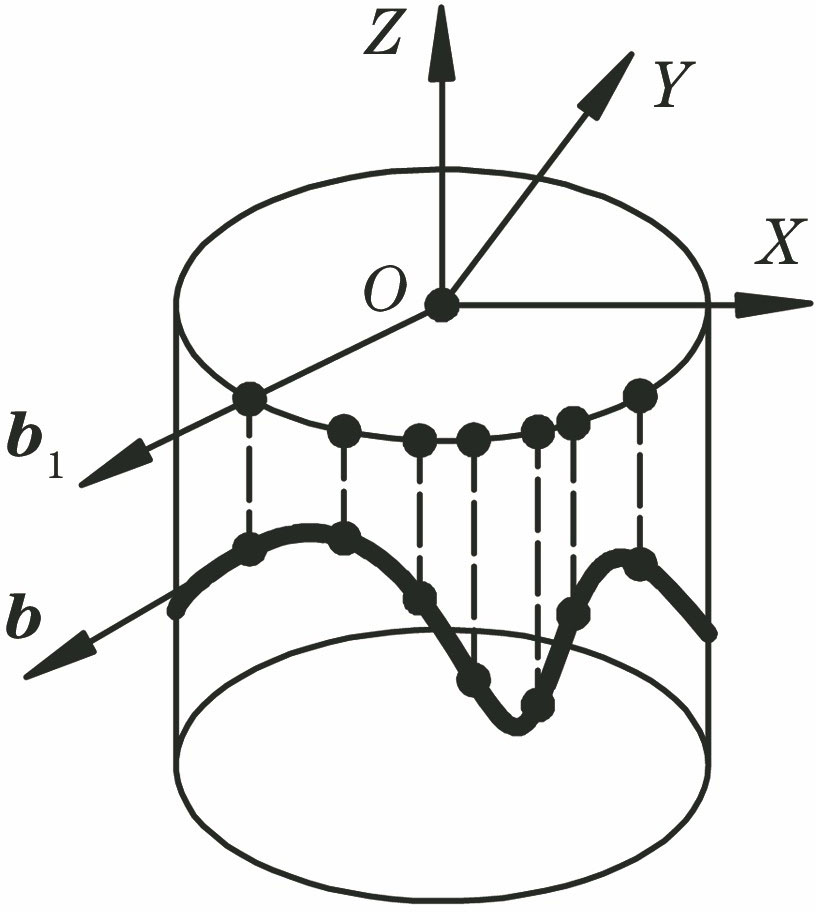
图 2. 离散差分原理图
Fig. 2. Schematic of discrete difference
下载图片 查看原文
图 3. Z轴投影法原理
Fig. 3. Principle of Z axis projection
下载图片 查看原文
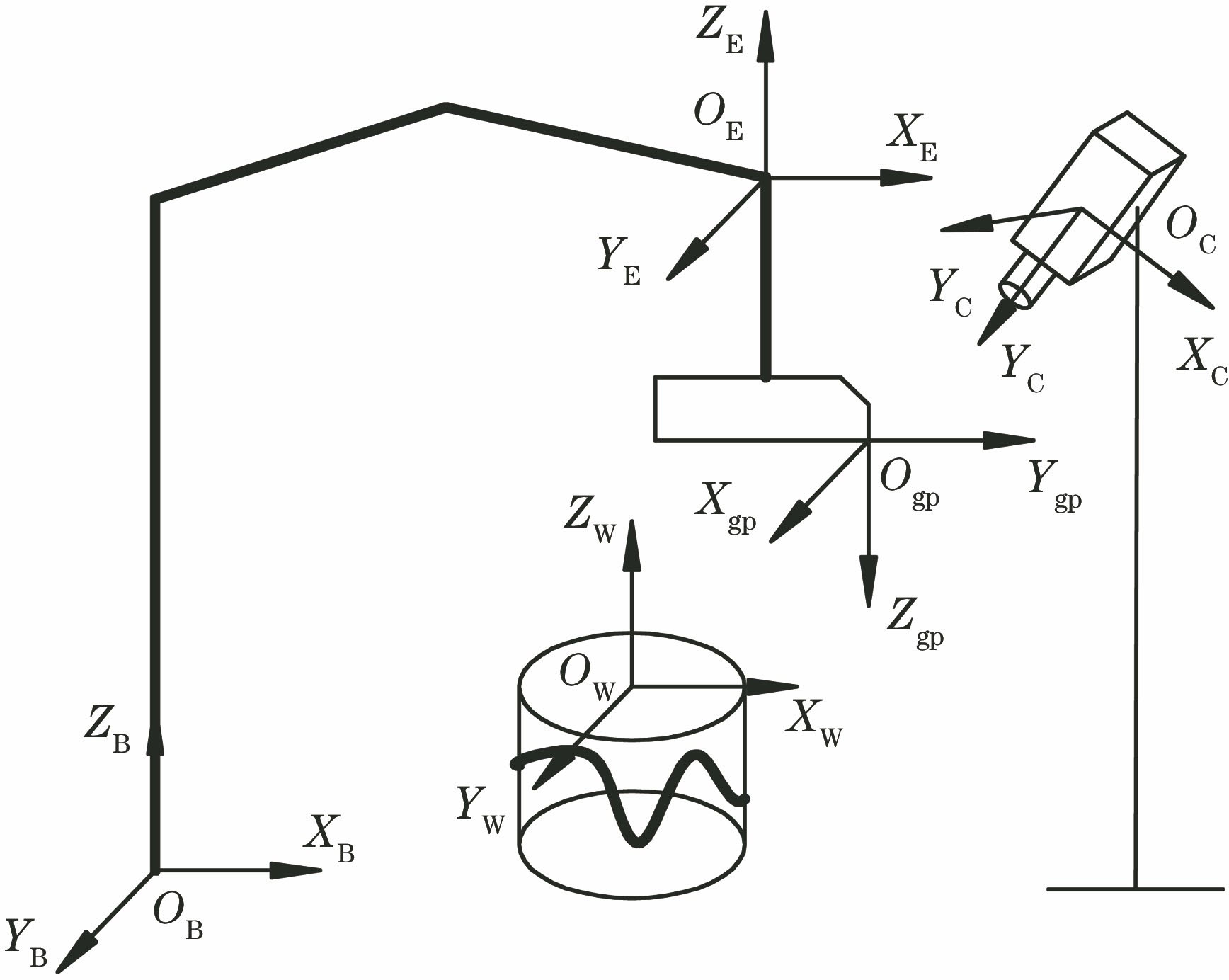
图 4. 机器人手眼系统变换原理
Fig. 4. Transformation principle of robot hand-eye system
下载图片 查看原文
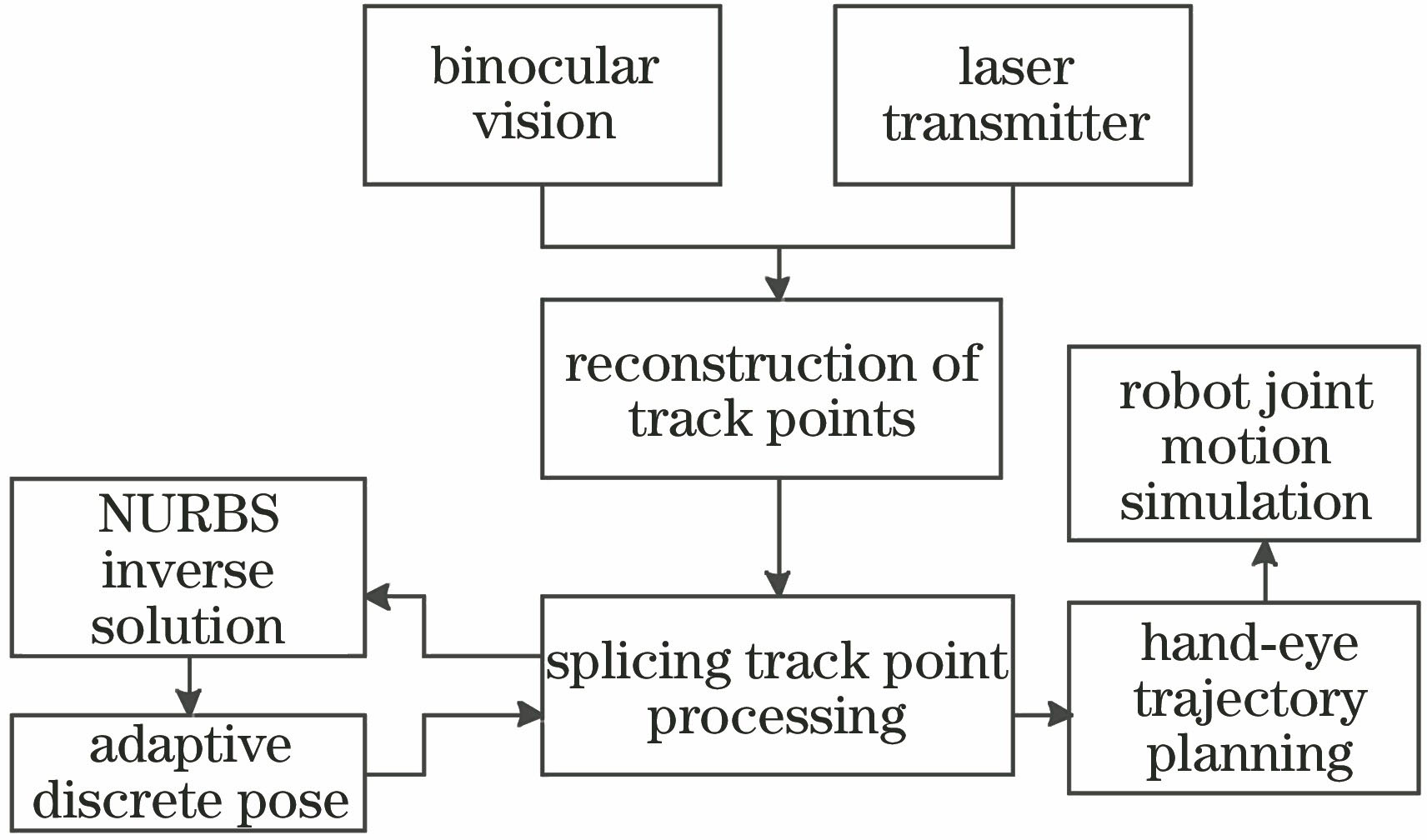
图 5. 方案流程图
Fig. 5. Flow chart of program
下载图片 查看原文
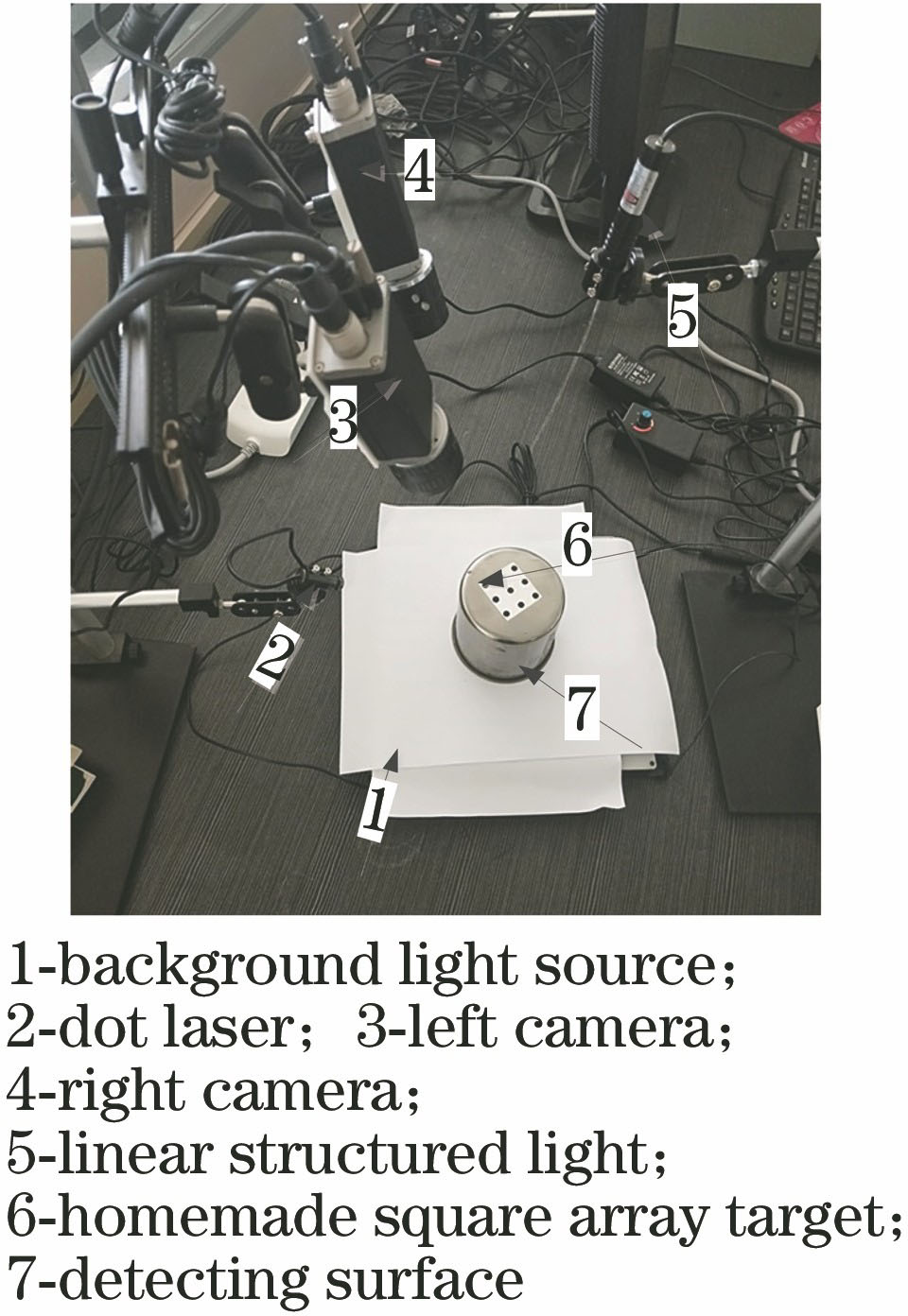
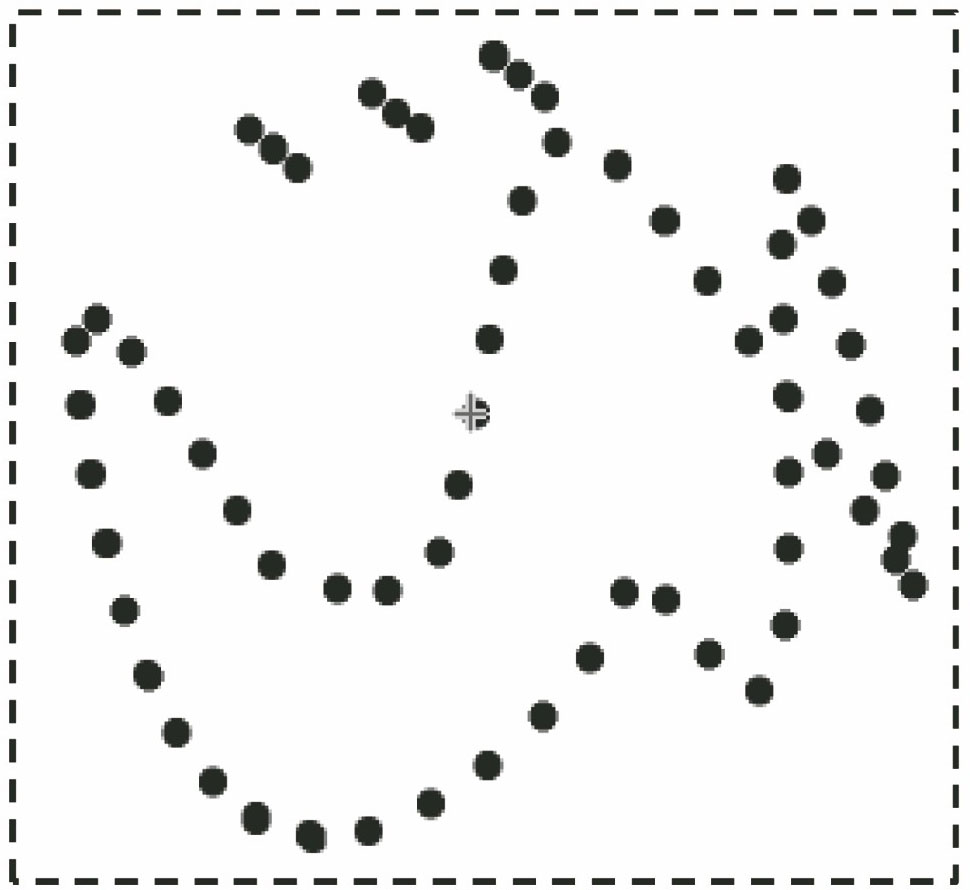
图 6. 双相机测量系统图
Fig. 6. Diagram of measurement system with dual cameras
下载图片 查看原文
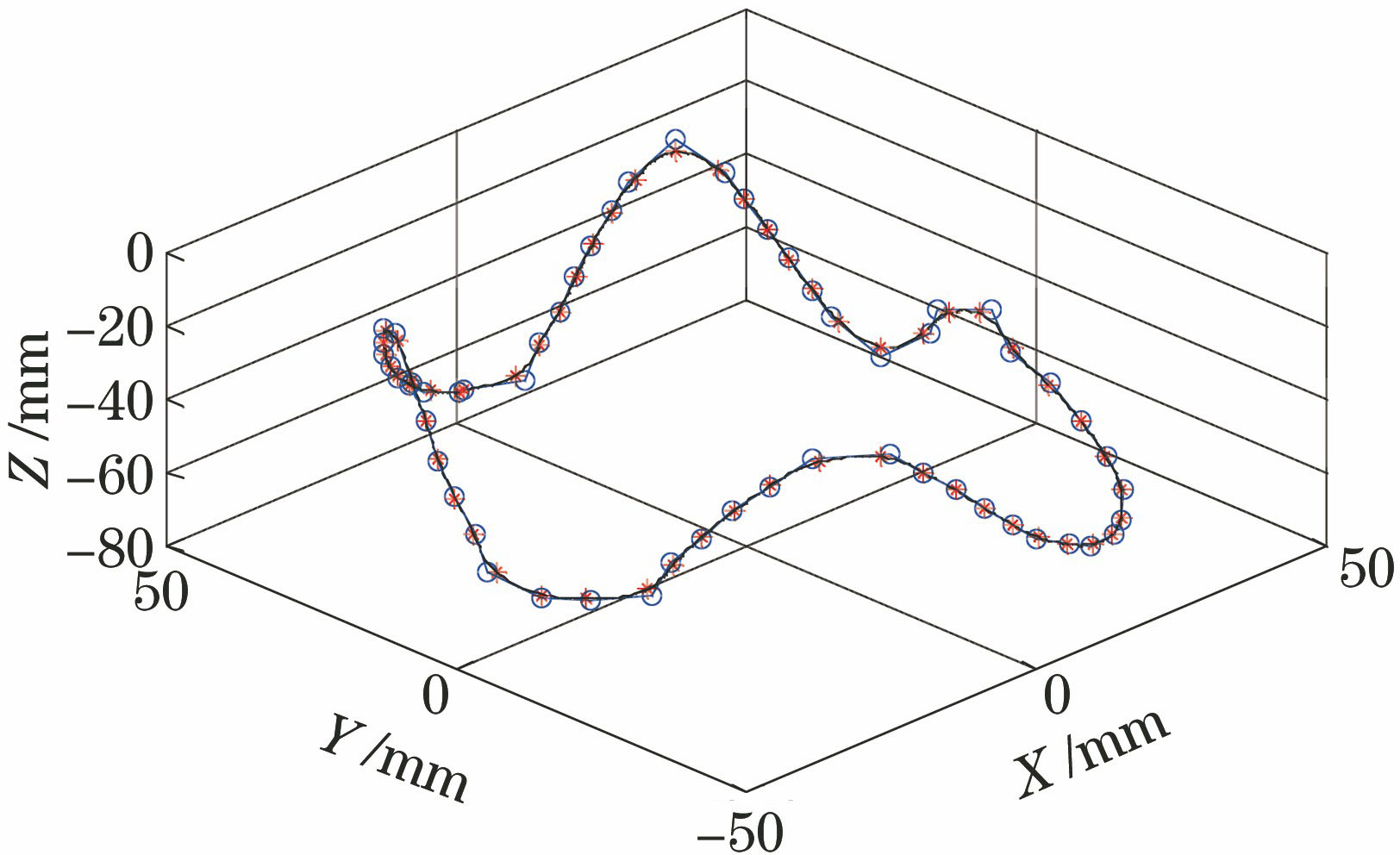
图 7. 靶标3D重构轨迹
Fig. 7. 3D reconstructed trajectory of target
下载图片 查看原文
图 8. 靶标点拟合轨迹
Fig. 8. Fitting track of target point
下载图片 查看原文
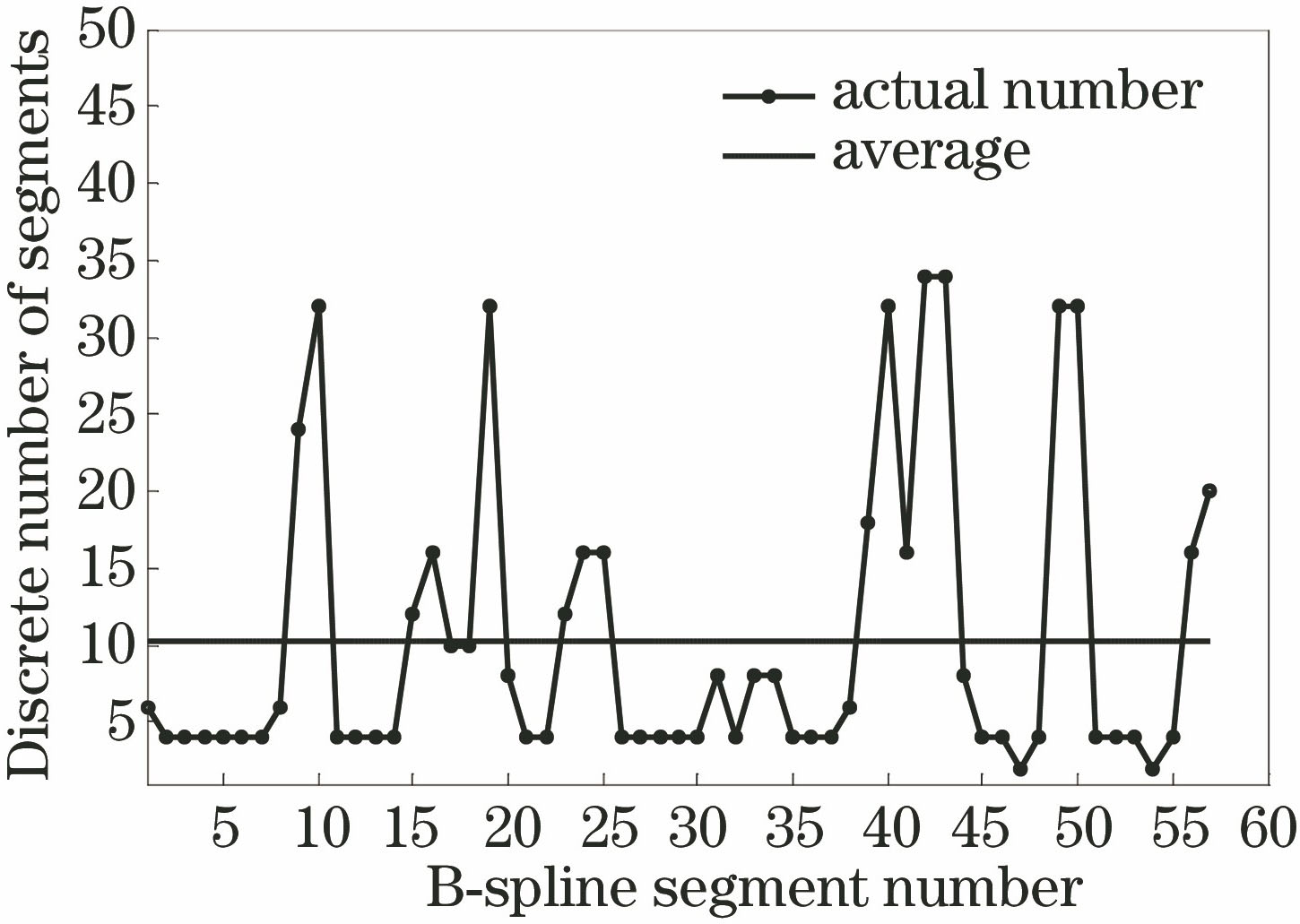
图 9. 曲线段对应的位姿数目
Fig. 9. Number of poses corresponding to the curve segment
下载图片 查看原文
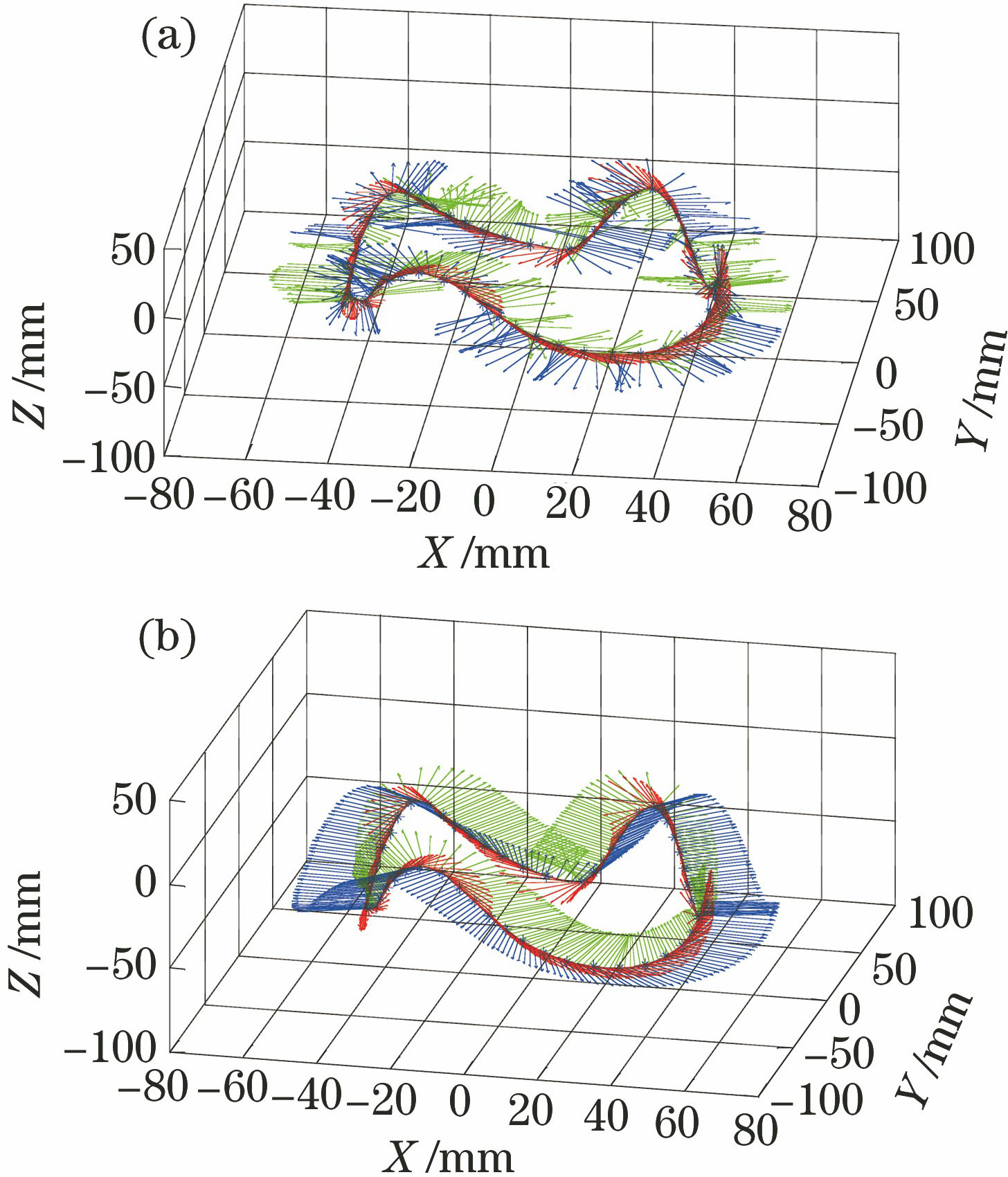
图 10. 不同算法的姿态对比。(a)德布尔递推算法;(b)离散差分投影算法
Fig. 10. Attitude comparison of different algorithms. (a) Debord recursive algorithm; (b) discrete difference projection algorithm
下载图片 查看原文
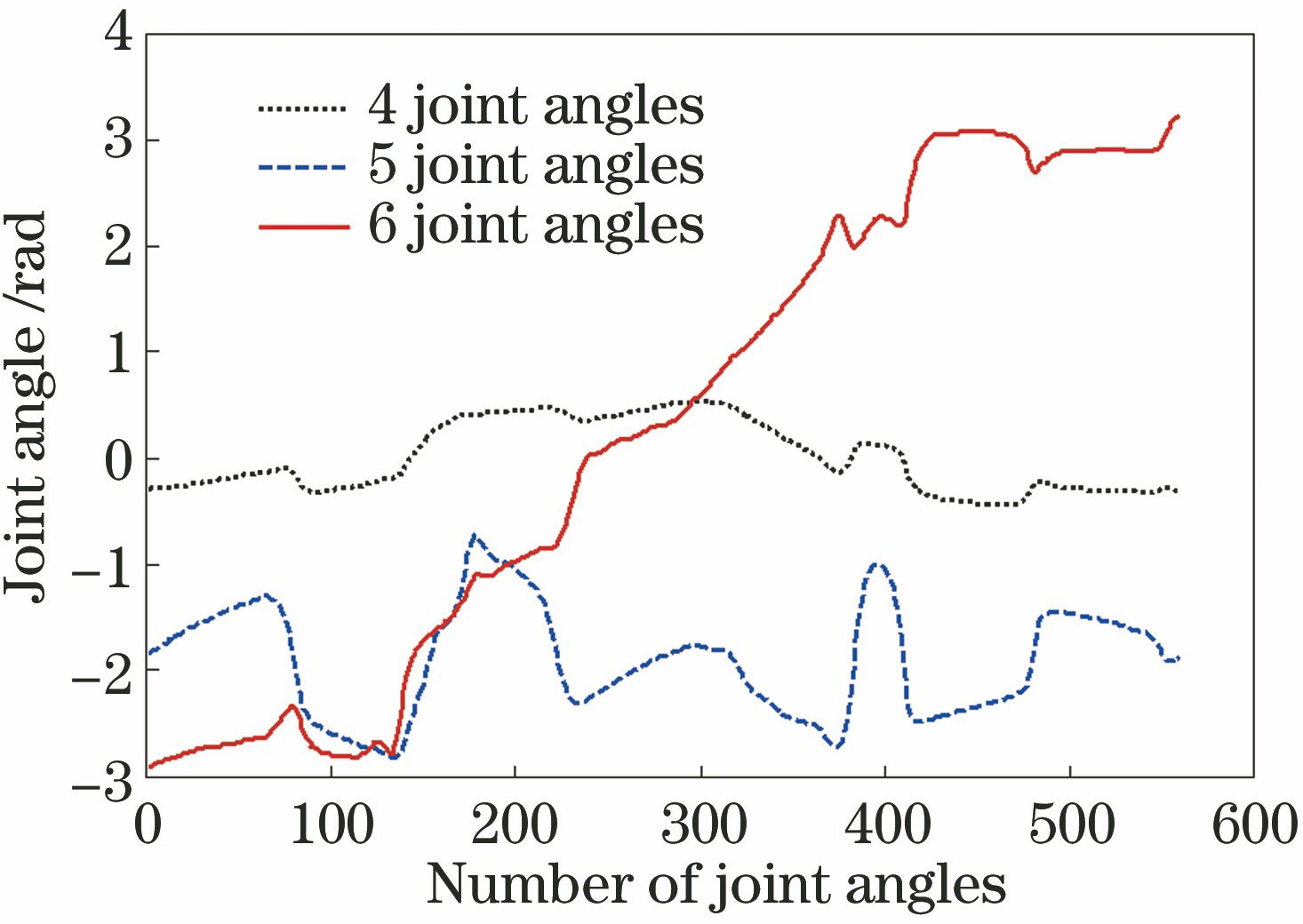
图 11. 机器人关节角变化曲线
Fig. 11. Curve of the joint angle of robot
下载图片 查看原文
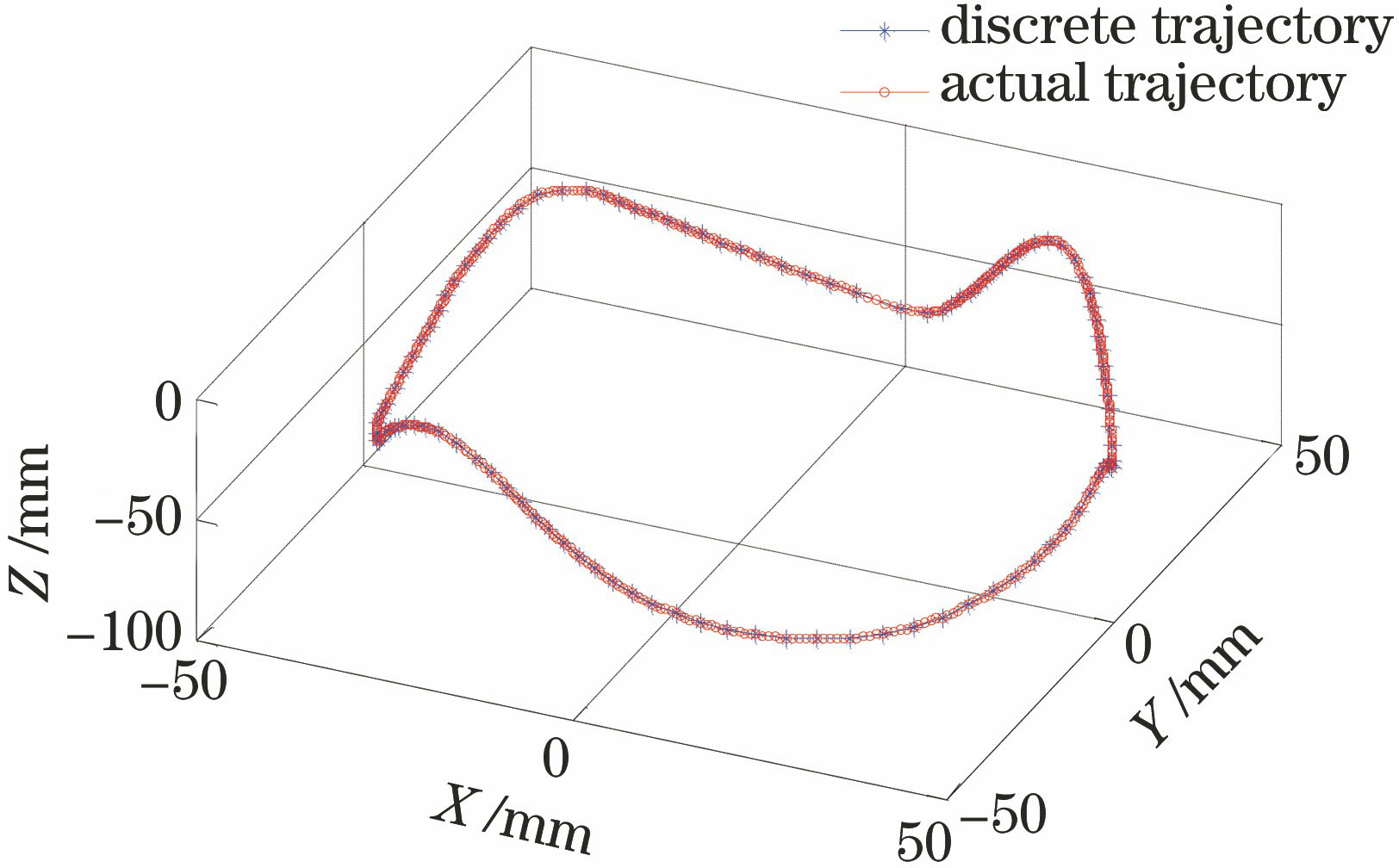
图 12. 仿真与实际轨迹对比
Fig. 12. Comparison of simulation and actual trajectory
下载图片 查看原文
表 1激光靶标轨迹的世界坐标
Table1. World coordinate of laser target trajectoryunit: mm
| X | Y | Z | X | Y | Z |
|---|
| -4.4708 | 45.3343 | -65.3792 | 17.2486 | -42.1281 | -62.8574 | | -10.7239 | 44.0184 | -60.0996 | 11.1596 | -44.0246 | -57.4907 | | -15.9431 | 42.2474 | -53.7082 | 23.7587 | -39.0251 | -66.7299 | | -20.2831 | 40.0426 | -47.0697 | 5.6721 | -44.8949 | -51.3188 | | -24.0247 | 37.6547 | -40.1974 | 30.0616 | -34.1863 | -69.5896 | | -27.3184 | 35.1549 | -32.9508 | 0.7824 | -45.0217 | -44.5103 | | -30.3526 | 32.3436 | -25.5848 | -7.7128 | -43.7856 | -30.2402 | | -33.3941 | 28.9972 | -18.3064 | 35.9325 | -28.4488 | -69.5238 | | -44.3854 | -0.9169 | -56.6251 | 40.2012 | -21.4707 | -67.9720 | | -43.9312 | 3.2452 | -49.8801 | 43.1472 | -14.2493 | -65.0595 | | -43.3691 | 7.0826 | -42.5207 | 23.6056 | -39.0745 | -67.0302 | | -42.6878 | 10.6839 | -34.7013 | 44.8384 | -7.0544 | -61.4039 | | -41.3777 | 14.1791 | -27.5325 | 45.5091 | -25.1415 | -56.5349 | | -39.8984 | 18.0357 | -20.1913 | 45.5765 | 5.3917 | -50.6221 | | -33.2697 | 28.9925 | -18.5702 | 41.6464 | 18.5807 | -66.2476 | | -37.1963 | 23.3390 | -14.5069 | 43.7152 | 13.5538 | -60.3271 | | -38.7525 | -21.4212 | -51.5188 | 39.1356 | 23.5746 | -60.5420 | | -36.8922 | -24.0920 | -44.1134 | 37.4744 | 26.4241 | -52.8585 | | -34.7071 | -26.7976 | -36.4278 | 44.7438 | 10.0653 | -52.8967 | | -32.0580 | -29.6642 | -29.0198 | 35.9189 | 28.7844 | -45.0712 | | -28.7311 | -32.7802 | -22.0840 | 34.3538 | 30.9418 | -36.9648 | | -23.8762 | -36.3920 | -16.4489 | 8.5728 | 44.4551 | -60.5686 | | 0.7385 | -44.8554 | -44.4929 | 32.5519 | 33.0054 | -29.0969 | | -3.5894 | -44.4082 | -37.4481 | 11.3752 | 43.8609 | -52.9607 | | -12.0735 | -42.3674 | -23.2879 | 13.6961 | 43.3275 | -45.0121 | | -17.2287 | -40.2845 | -17.0578 | 30.2913 | 35.1953 | -21.3872 | | 21.3646 | 40.8145 | -21.3756 | 15.9891 | 42.7043 | -37.0399 | | 26.0334 | 38.3677 | -15.3660 | 18.4254 | 41.8852 | -29.2453 |
|
查看原文
苏工兵, 李超, 刘天祥, 房纯. 基于视觉的空间曲线机器人加工轨迹规划[J]. 激光与光电子学进展, 2020, 57(10): 101503. Gongbing Su, Chao Li, Tianxiang Liu, Chun Fang. Processing Trajectory Planning of Space Curved Robot Based on Vision[J]. Laser & Optoelectronics Progress, 2020, 57(10): 101503.





 PDF全文
PDF全文

