激光与光电子学进展, 2020, 57 (8): 081102, 网络出版: 2020-04-03
基于点线特征结合的单目相对位姿测量方法  下载: 1410次
下载: 1410次
Relative Pose Measurement Method for Monocular Cameras By Combining the Point and Line Features
图 & 表
图 2. 相机坐标系校正。(a)校正前;(b)校正后
Fig. 2. Camera coordinates system correction. (a) Before correction; (b) after correction
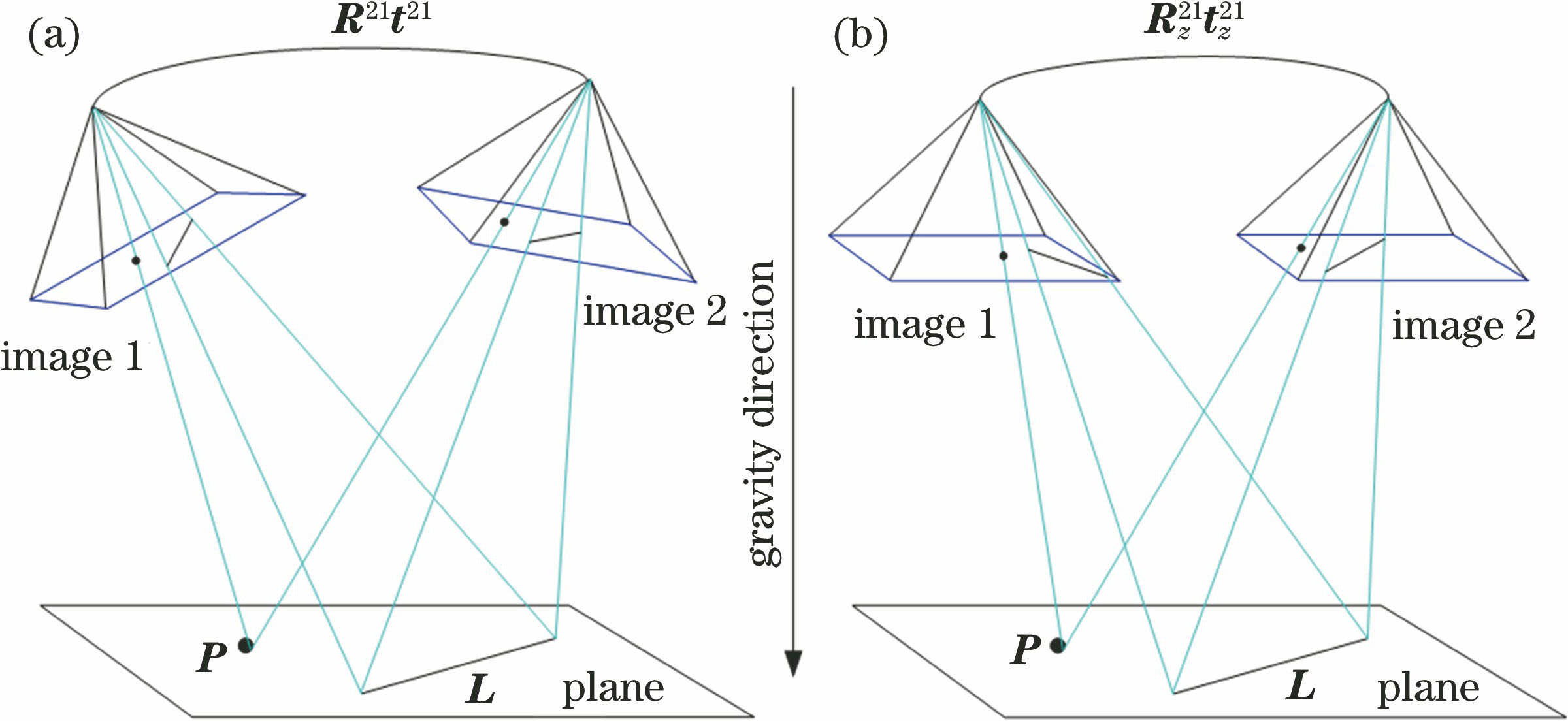
图 3. 仿真实验结果。(a)(b)误差随噪声变化曲线;(c)(d)误差随滚转角测量误差变化曲线;(e)(f)误差随俯仰角测量误差变化曲线
Fig. 3. Results of simulation experiment. (a)(b) Residual value with varying noise; (c)(d) residual value with varying roll angle error; (e)(f) residual value with varying pitch angle error
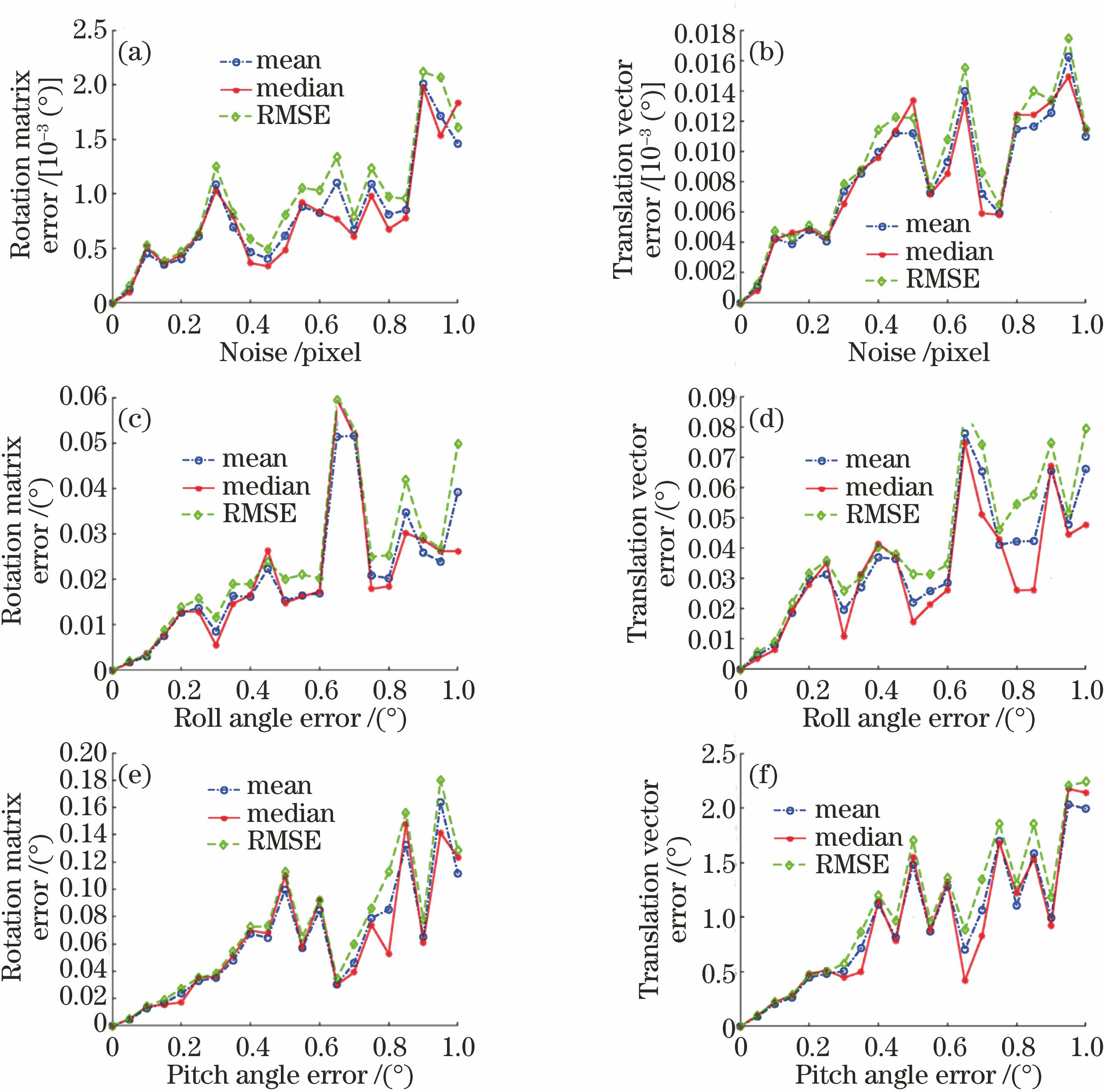
图 4. 直线匹配结果。(a)(b)第1帧和第5帧的匹配;(c)(d)第1帧和第10帧的匹配
Fig. 4. Results of line matching. (a)(b) Matching results of 1st frame and 5th frame; (c)(d) matching results of 1st frame and 10th frame
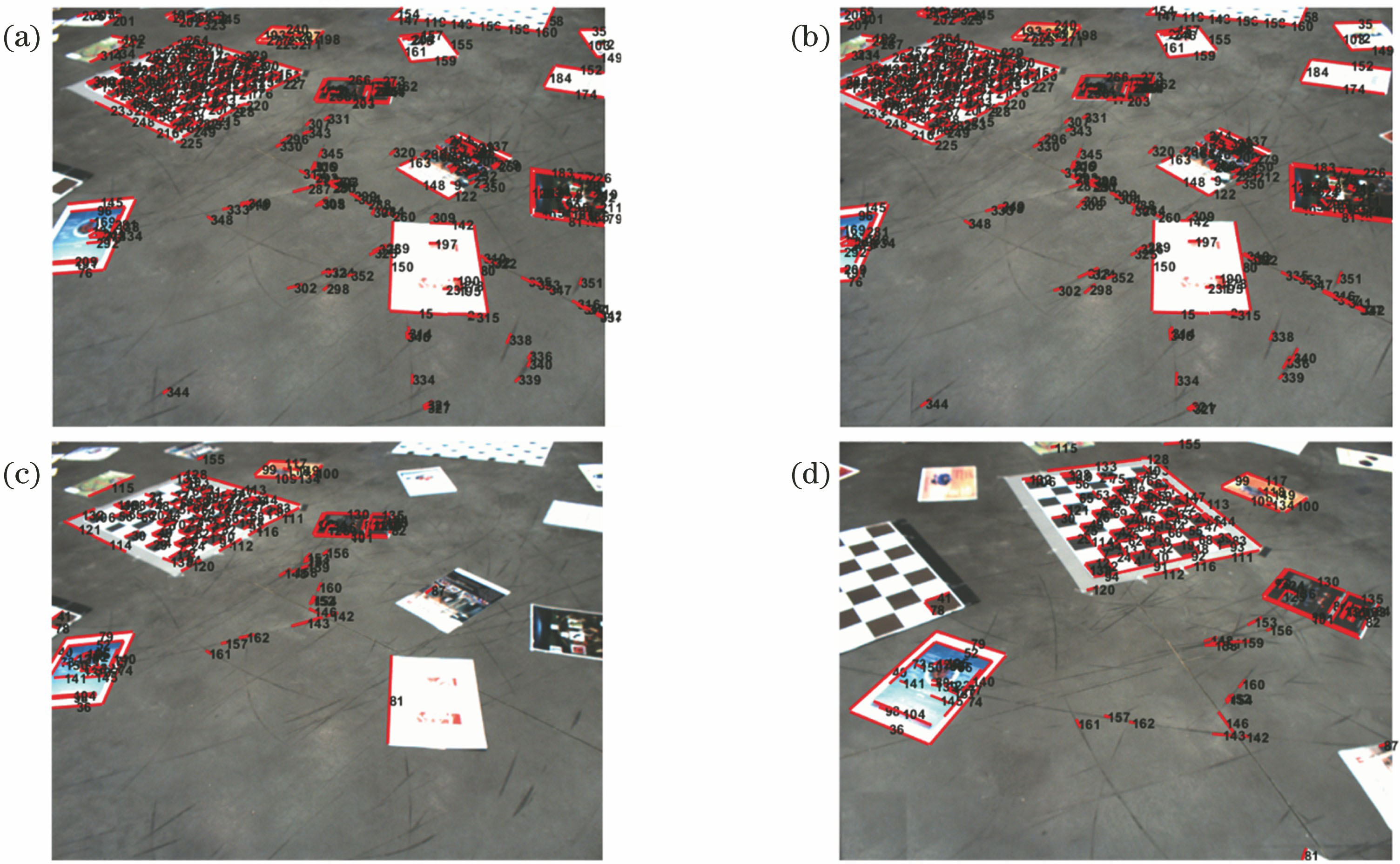
图 5. 点特征的匹配结果。(a)第1帧;(b)第10帧
Fig. 5. Results of point matching. (a) 1st frame; (b) 10th frame
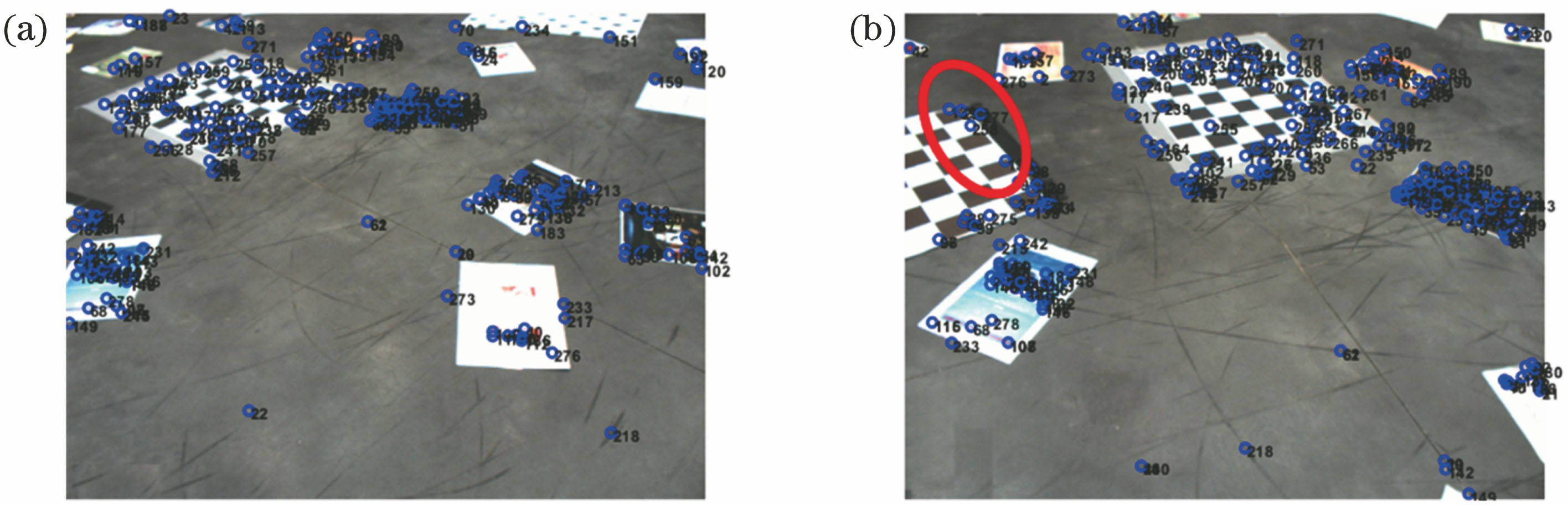
图 6. 点线特征的匹配结果。(a)第1帧;(b)第10帧
Fig. 6. Results of point-line matching. (a) 1st frame; (b) 10th frame
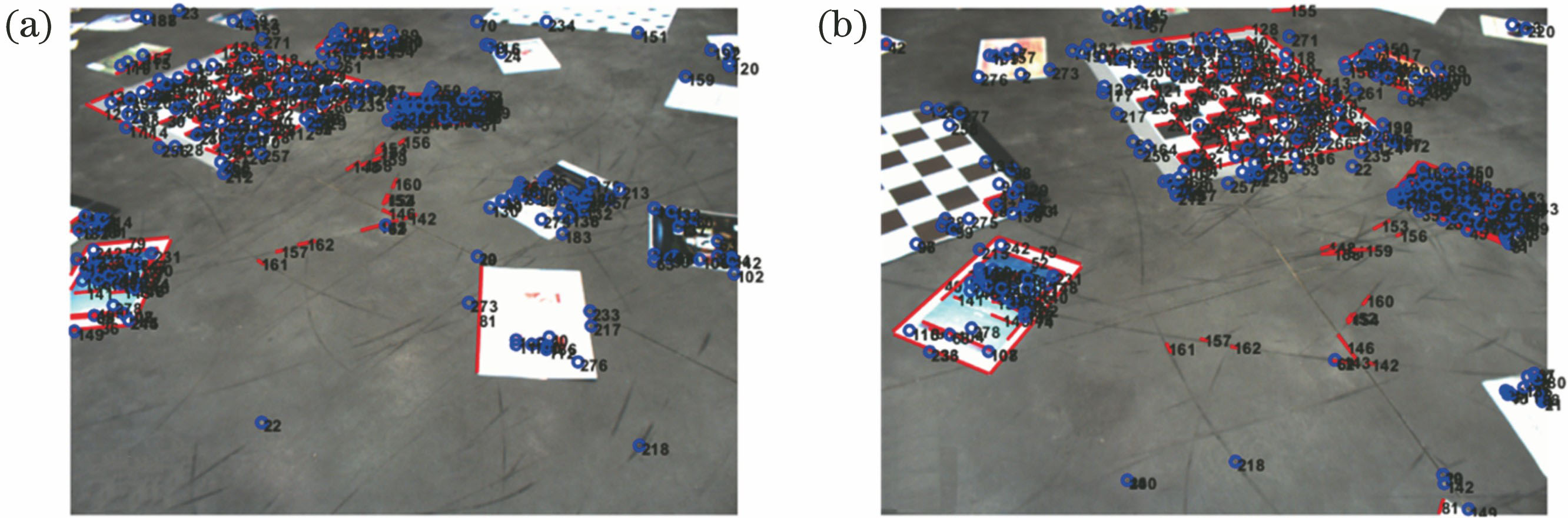
表 1旋转矩阵和平移向量的残差
Table1. Residual of rotation matrix and translation vector
| ||||||||||||||
李涛, 关棒磊, 张家铭, 孙放, 尚洋. 基于点线特征结合的单目相对位姿测量方法[J]. 激光与光电子学进展, 2020, 57(8): 081102. Tao Li, Banglei Guan, Jiaming Zhang, Fang Sun, Yang Shang. Relative Pose Measurement Method for Monocular Cameras By Combining the Point and Line Features[J]. Laser & Optoelectronics Progress, 2020, 57(8): 081102.



 PDF全文
PDF全文

