光学学报, 2019, 39 (5): 0528003, 网络出版: 2019-05-10
基于核密度估计的城市动态密集场景激光雷达定位  下载: 1062次
下载: 1062次
Robust Localization Based on Kernel Density Estimation in Dynamic Diverse City Scenes Using Lidar
图 & 表
图 1. 利用所提算法构建的高精度地图。(a)高度地图;(b)反射率地图
Fig. 1. High-accuracy maps constructed by proposed algorithm. (a) Height map; (b) reflectivity map
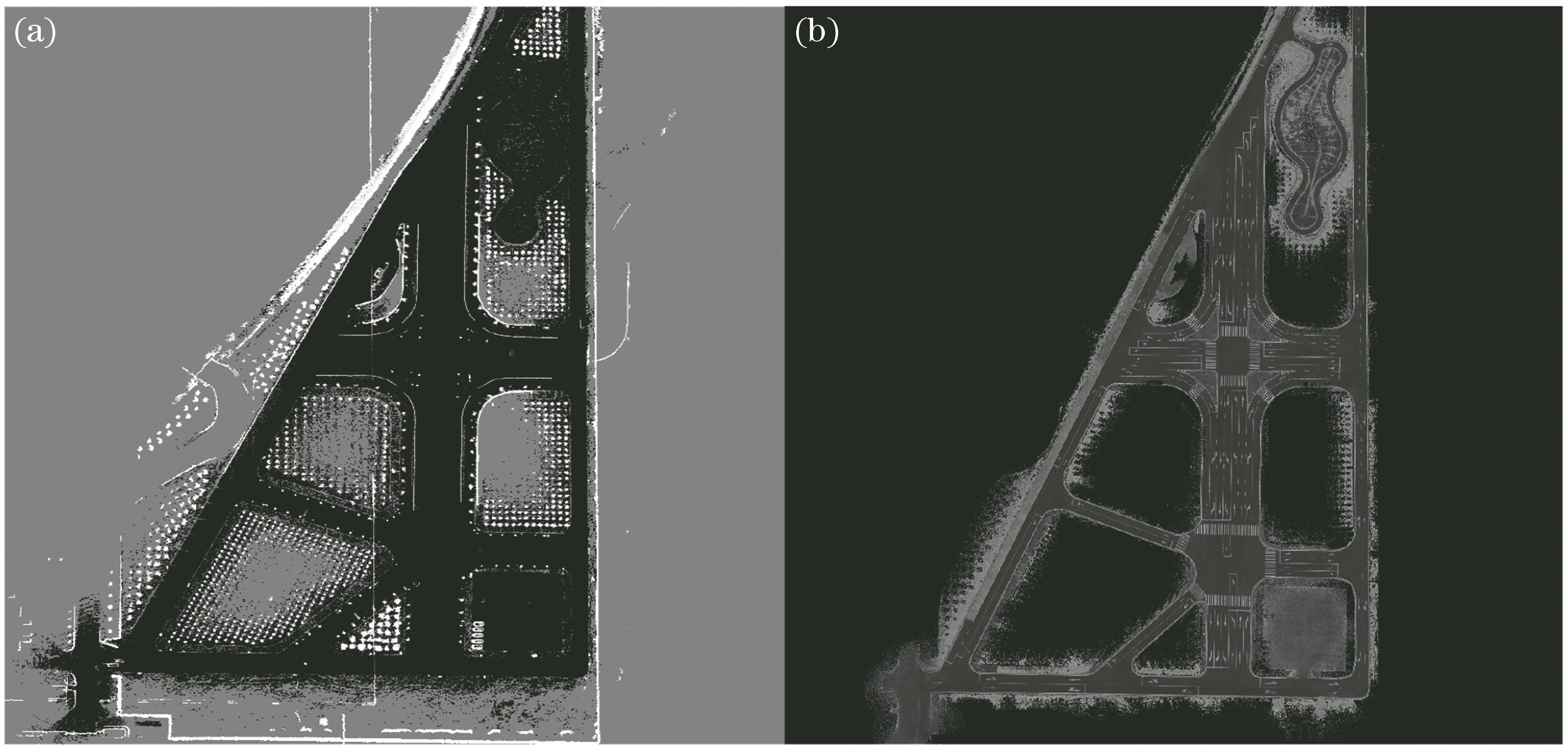
图 4. 使用所提算法定位前后的运动轨迹
Fig. 4. Moving trajectories before and after localization by proposed algorithm
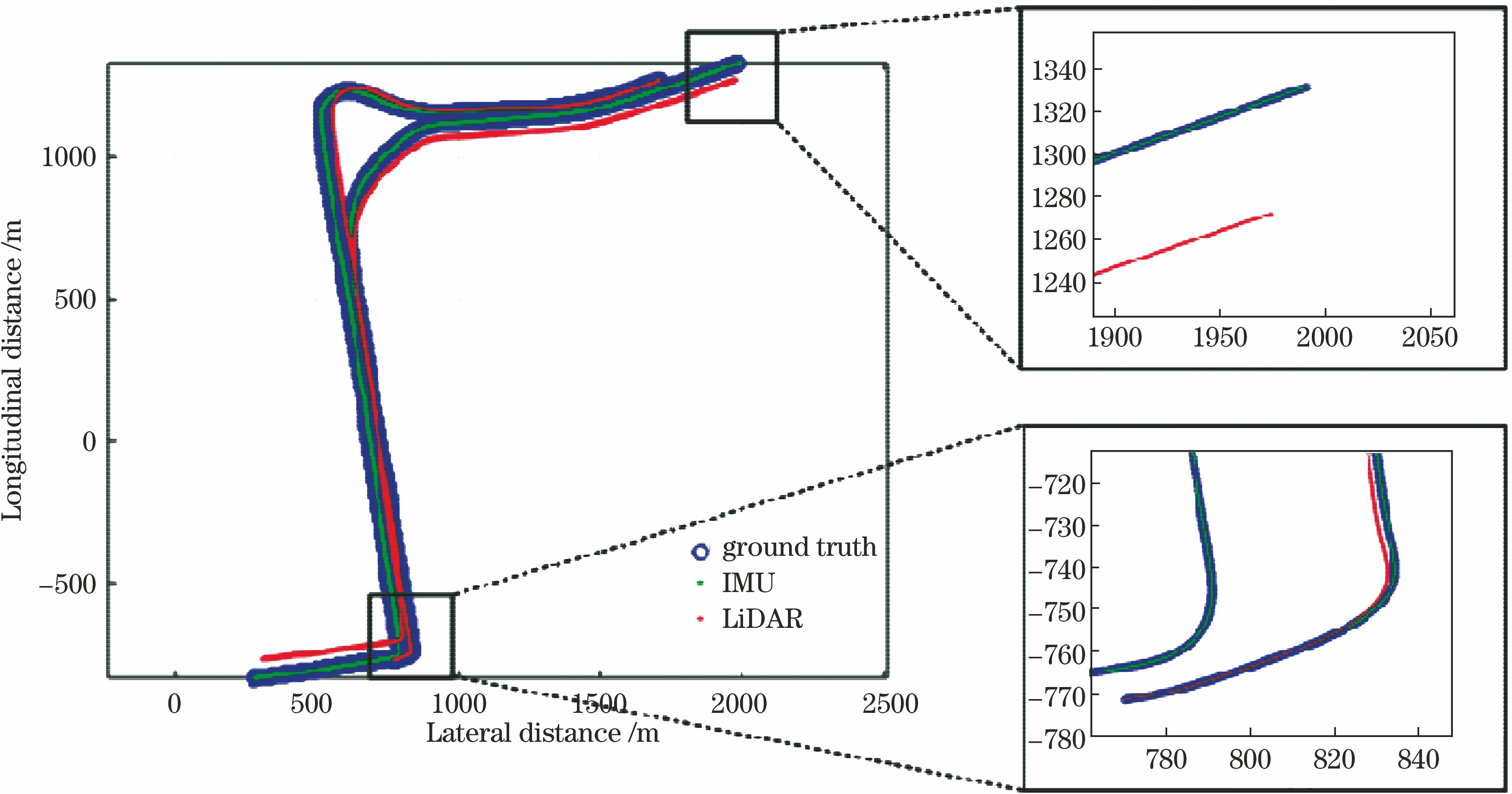
图 5. 3种算法在实验1中的定位结果。(a)横向误差;(b)纵向误差;(c)航向角误差
Fig. 5. Comparison of localization results in experiment 1 by three algorithms. (a) Lateral error; (b) longitudinal error; (c) heading angle error
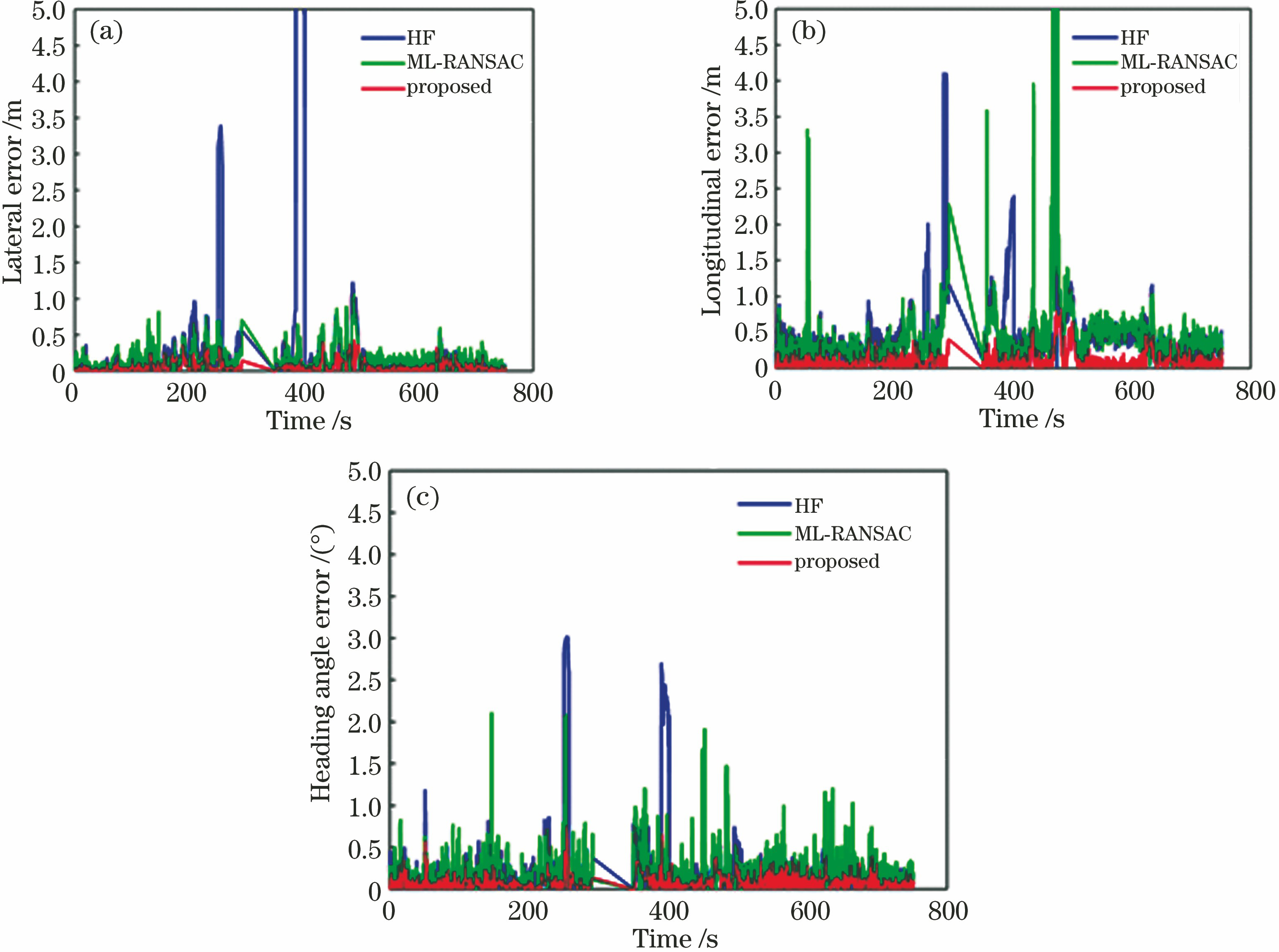
图 6. 路口的定位结果对比。(a)俯视图;(b)三维视图;(c)相机前视图;(d) HF算法;(e) ML-RANSAC算法;(f)所提算法
Fig. 6. Localization results of cross road. (a) Aerial view; (b) 3D view; (c) forward camera view; (d) HF algorithm; (e) ML-RANSAC algorithm; (f) proposed algorithm
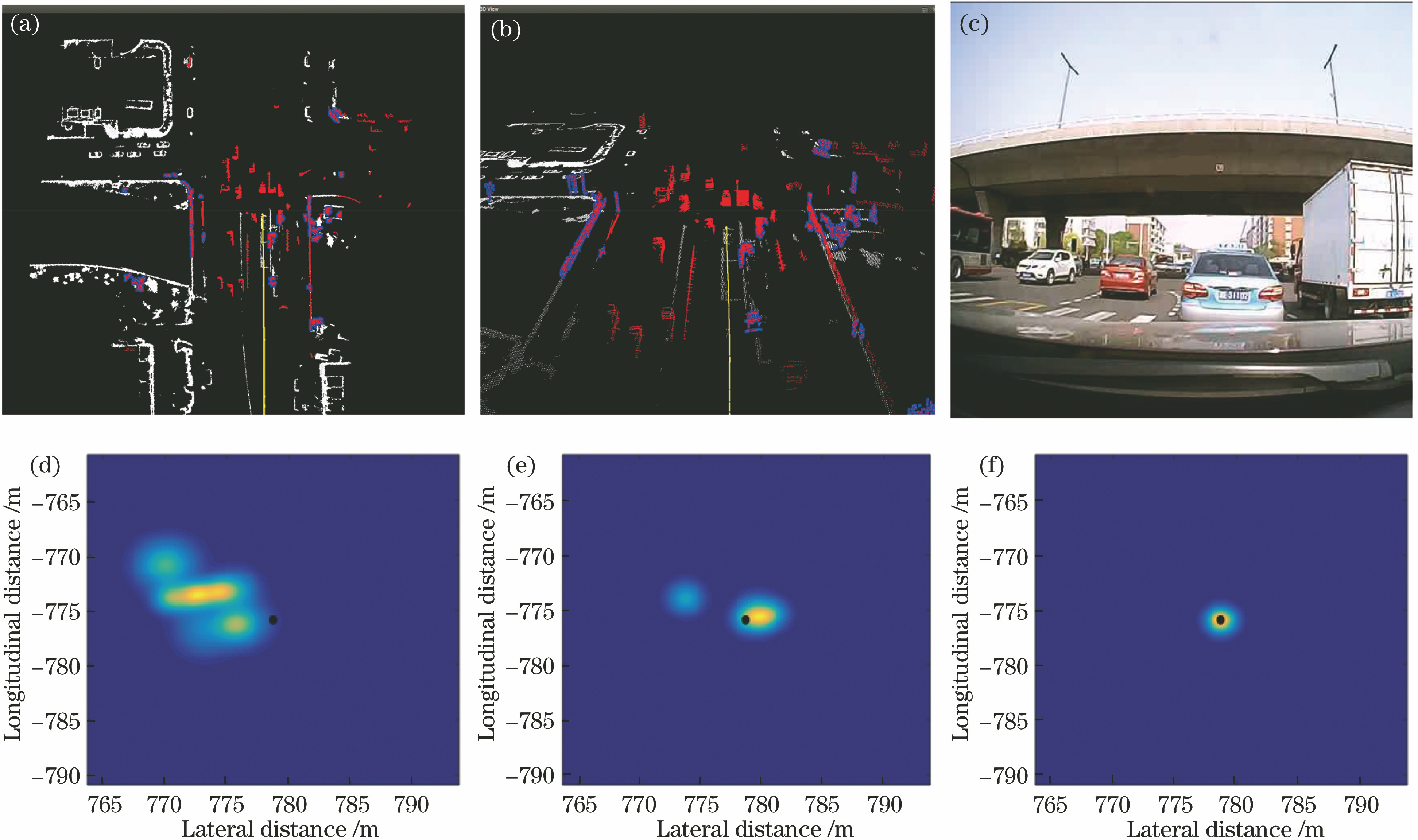
图 7. 直道的定位结果对比。(a)俯视图;(b)三维视图;(c)相机前视图;(d) HF算法;(e) ML-RANSAC算法;(f)所提算法
Fig. 7. Localization results of straight road. (a) Aerial view; (b) 3D view; (c) forward camera view; (d) HF algorithm; (e) ML-RANSAC algorithm; (f) proposed algorithm

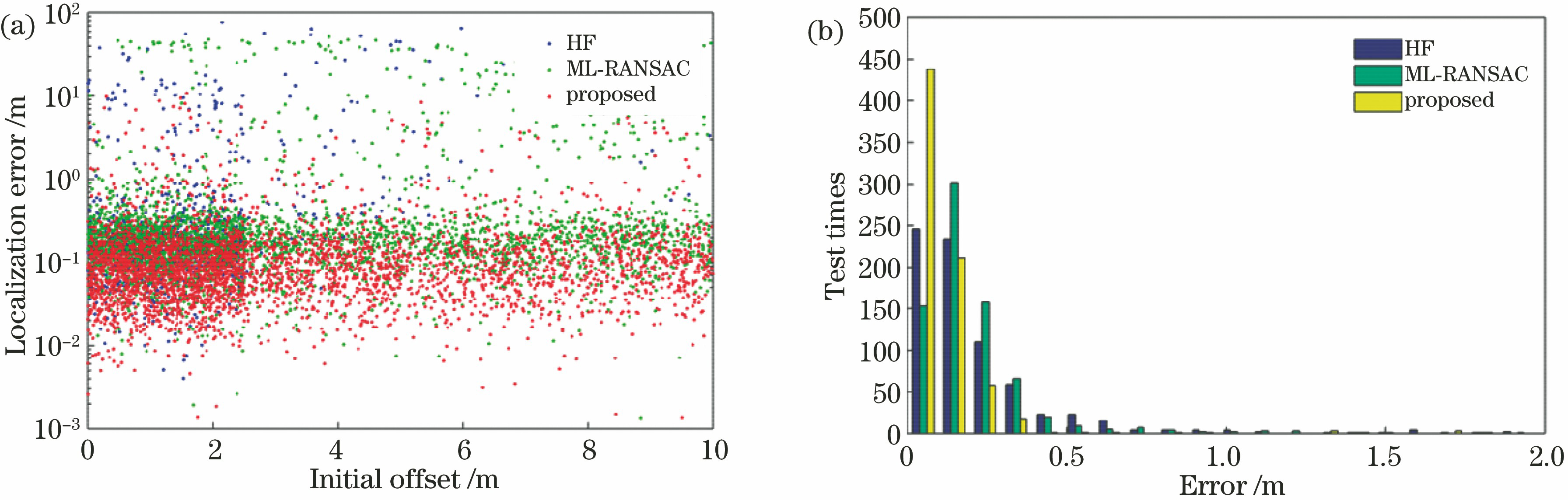
表 13种算法在不同初始位置偏差时的定位统计结果
Table1. Localization statistical results by three algorithms under different initial pose deviations
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
王任栋, 李华, 赵凯, 徐友春. 基于核密度估计的城市动态密集场景激光雷达定位[J]. 光学学报, 2019, 39(5): 0528003. Rendong Wang, Hua Li, Kai Zhao, Youchun Xu. Robust Localization Based on Kernel Density Estimation in Dynamic Diverse City Scenes Using Lidar[J]. Acta Optica Sinica, 2019, 39(5): 0528003.



 PDF全文
PDF全文

