基于视觉导航的输电线杆塔方位确定方法  下载: 1286次
下载: 1286次
Methodfor Orientation Determination of Transmission Line Tower Based on Visual Navigation
1 上海大学通信与信息工程学院, 上海 200444
2 上海先进通信与数据科学研究院, 上海 200444
3 国网山东省电力公司, 山东 济南 250000
图 & 表
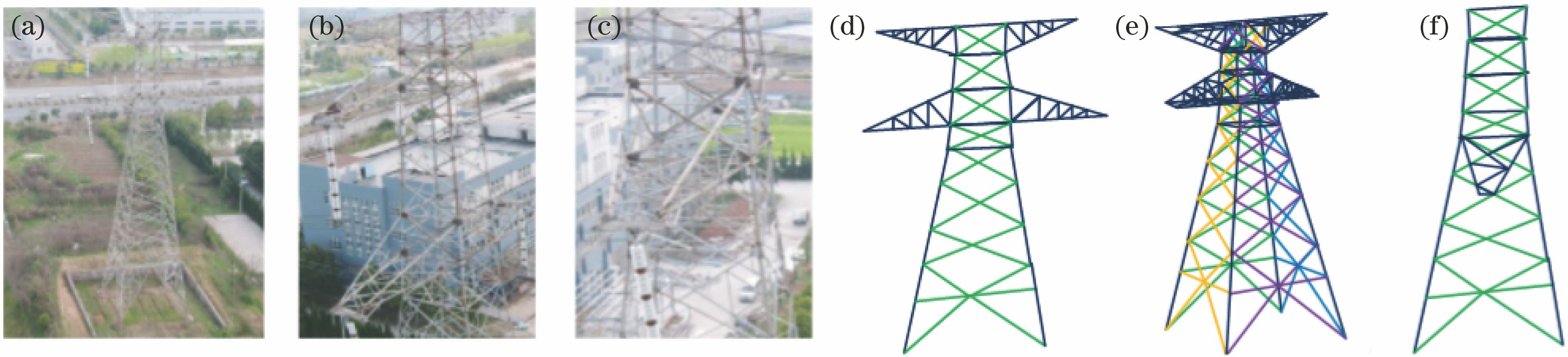
图 1. 杆塔的航拍图像与示意图。(a)正视图像;(b)正侧面图像;(c)侧面图像;(d)正视示意图;(e)正侧面示意图;(f)侧面示意图
Fig. 1. Aerial images and diagrams of towers. (a) Front image; (b) front side image; (c) side image; (d) front view diagram; (e) front side view diagram; (f) side view diagram
下载图片 查看原文
图 2. 导线穿过直线杆塔时所形成的折线
Fig. 2. Broken lines formed when wire passing through straight tower
下载图片 查看原文
图 3. 耐张杆塔中引流线与导线位置的关系
Fig. 3. Location relationship between guiding lines and wires in tensile tower
下载图片 查看原文
图 4. 杆塔结构特征。(a)塔头处的交叉斜线段;(b)(c)塔身上的斜线段会聚到主框架;(d)(e)塔内交叉特征
Fig. 4. Structural characteristics of tower. (a) Cross slanted segments of tower head; (b)(c) slanted segments converged onto main frame of tower body; (d)(e) crossing characteristics in tower
下载图片 查看原文
图 5. 由远及近杆的塔检测框架
Fig. 5. Framework of tower detection from far to near
下载图片 查看原文
图 6. 各像素点梯度的计算
Fig. 6. Calculation of gradient for each pixel point
下载图片 查看原文
图 7. 梯度的角度分布
Fig. 7. Angular distribution of gradient
下载图片 查看原文
图 8. 每个cell中的梯度统计直方图
Fig. 8. Gradient statistical histogram in each cell
下载图片 查看原文
图 9. HOG特征提取和MLP感知模型分类
Fig. 9. HOG feature extraction and MLP perception model classification
下载图片 查看原文
图 10. 无人机视觉感知平台及在不同方位下杆塔局部区域。(a)无人机视觉感知平台;(b1)正面塔顶;(b2)正侧面塔顶;(b3)侧面塔顶;(c1)正面塔身;(c2)正侧面塔身;(c3)侧面塔身;(d1)正面塔底;(d2)正侧面塔底;(d3)侧面塔底
Fig. 10. Visual perception platform for UAV and local areas of tower under different orientations. (a) Visual perception platform for UAV; (b1) front of tower top; (b2) front side of tower top; (b3) side of tower top; (c1) front of tower body; (c2) front side of tower body; (c3) side of tower body; (d1) front of tower bottom; (d2) front side of tower bottom; (d3) side of tower bottom
下载图片 查看原文
表 1杆塔局部区域方位识别的准确率
Table1. Accuracy rate of identification of local area orientation of tower
| Algorithm | Fig. 10 (b) | Fig. 10 (c) | Fig. 10 (d) |
|---|
| Front | Front side | Side | Front | Front side | Side | Front | Front side | Side |
|---|
| ZF-Net+Faster RCNN | 0.682 | 0.691 | 0.702 | 0.618 | 0.699 | 0.664 | 0.677 | 0.686 | 0.629 | | VGG16+Faster RCNN | 0.740 | 0.724 | 0.743 | 0.641 | 0.756 | 0.751 | 0.765 | 0.731 | 0.763 | | ResNet-101+Faster RCNN | 0.772 | 0.780 | 0.788 | 0.693 | 0.801 | 0.793 | 0.787 | 0.759 | 0.789 | | HOG+MLP(Proposed) | 0.826 | 0.818 | 0.859 | 0.879 | 0.891 | 0.902 | 0.878 | 0.869 | 0.821 |
|
查看原文
表 2杆塔局部区域方位识别所需时间
Table2. Time required for identification of local area orientation of towerms
| Algorithm | Fig. 10 (b) | Fig. 10 (c) | Fig. 10 (d) |
|---|
| Front | Front side | Side | Front | Front side | Side | Front | Front side | Side |
|---|
| ZF-Net +Faster RCNN | 31 | 33 | 29 | 26 | 30 | 37 | 29 | 33 | 31 | | VGG16+Faster RCNN | 140 | 159 | 154 | 145 | 148 | 143 | 141 | 153 | 157 | | ResNet-101+Faster RCNN | 172 | 175 | 168 | 169 | 172 | 174 | 176 | 167 | 168 | | HOG+MLP(Proposed) | 8 | 10 | 9 | 11 | 9 | 10 | 8 | 9 | 8 |
|
查看原文
表 3数据增广后杆塔局部区域方位识别的准确率
Table3. Accuracy rate of local area orientation of tower after data augmentation
| Algorithm | Fig. 10 (b) | Fig. 10 (c) | Fig. 10 (d) |
|---|
| Front | Front side | Side | Front | Front side | Side | Front | Front side | Side |
|---|
| ZF-Net+Faster RCNN | 0.653 | 0.671 | 0.708 | 0.621 | 0.652 | 0.634 | 0.650 | 0.619 | 0.639 | | VGG16+Faster RCNN | 0.732 | 0.738 | 0.749 | 0.661 | 0.754 | 0.752 | 0.762 | 0.725 | 0.778 | | ResNet-101+Faster RCNN | 0.781 | 0.783 | 0.798 | 0.701 | 0.801 | 0.808 | 0.787 | 0.762 | 0.789 | | HOG+MLP(Proposed) | 0.833 | 0.828 | 0.855 | 0.876 | 0.895 | 0.893 | 0.874 | 0.866 | 0.834 |
|
查看原文
表 4数据增广后杆塔局部区域方位识别所需时间
Table4. Time required for local area orientation of tower after data augmentationms
| Algorithm | Fig. 10 (b) | Fig. 10 (c) | Fig. 10 (d) |
|---|
| Front | Front side | Side | Front | Front side | Side | Front | Front side | Side |
|---|
| ZF-Net+Faster RCNN | 31 | 30 | 29 | 27 | 32 | 33 | 30 | 34 | 27 | | VGG16+Faster RCNN | 139 | 148 | 140 | 139 | 148 | 141 | 143 | 142 | 149 | | ResNet-101+Faster RCNN | 168 | 171 | 163 | 165 | 177 | 168 | 179 | 165 | 161 | | HOG+MLP(Proposed) | 10 | 7 | 6 | 8 | 9 | 11 | 9 | 9 | 8 |
|
查看原文
王祖武, 韩军, 孙晓斌, 杨波. 基于视觉导航的输电线杆塔方位确定方法[J]. 激光与光电子学进展, 2019, 56(8): 081006. Zuwu Wang, Jun Han, Xiaobin Sun, Bo Yang. Methodfor Orientation Determination of Transmission Line Tower Based on Visual Navigation[J]. Laser & Optoelectronics Progress, 2019, 56(8): 081006.













 PDF全文
PDF全文

