东南大学 仪器科学与工程学院, 江苏 南京 210096
为了满足水下运载体长航时、高精度、低成本的导航需要, 提出由激光陀螺单轴旋转捷联惯性导航系统、计程仪、深度计、光纤陀螺捷联式重力仪和数字重力异常图组成的捷联式重力无源导航系统。运载体的位置由激光陀螺单轴旋转捷联惯性导航系统给出; 光纤陀螺捷联式重力仪、计程仪和深度计组成水下捷联式重力测量系统, 以激光陀螺单轴旋转捷联惯性导航系统提供的位置信息、计程仪提供的速度信息和深度计提供的水深信息作为观测量, 应用扩展卡尔曼滤波计算出东、北、天坐标系下加速度计比力值, 使用低通滤波实时获得重力值和重力异常值。根据存贮在计算机中的数字重力异常图, 运用相关极值法, 计算得到运载体位置。2019年底, 捷联式重力无源导航系统进行了长时间船载试验, 对该系统试验数据进行了离线处理。试验结果表明, 在匹配海域内, 运载体位置误差小于1个重力异常图格网大小。
旋转捷联惯导系统(SINS) 捷联式重力仪 重力异常图 重力无源导航 rotating strapdown inertial navigation system(SINS strapdown gravimeter gravity anomaly map gravity passive navigation
Author Affiliations
Abstract
1 School of Information and Communication, Guilin University of Electronic Technology, Guilin 541004, China
2 Key Laboratory of THz Technology, Ministry of Education, Chengdu 610054, China
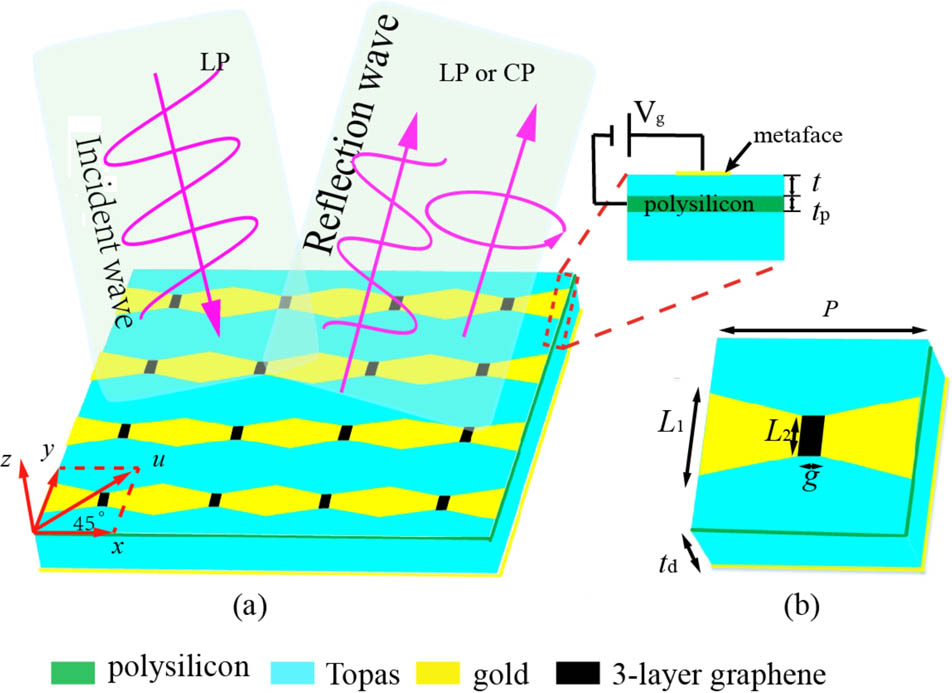
A metal–graphene hybrid metasurface polarization converter is designed in this Letter. The unit cell of the hybrid metasurface is composed of a butterfly-shaped structure whose branches are connected by multi-layer graphene sheets. The proposed device can be reconfigured from linear-to-circular polarization to cross-polarization by changing the Fermi energy of graphene. The simulation results show that for three-layer graphene, the device acts as a linear-to-circular polarization converter when EF = 0 eV and switches to a cross-polarization converter when EF = 0.5 eV. Compared with single-layer graphene, the device with three-layer graphene can maintain the cross-polarization conversion performance under low Fermi energy. Furthermore, two equivalent circuits in the x and y directions are developed to understand the working mechanism of the device.
graphene metasurface polarization converter THz Chinese Optics Letters
2020, 18(1): 013102









