1 深圳大学智能光测研究院,广东 深圳 518000
2 深圳大学物理与光电工程学院,广东 深圳 518000
由于缺少可参考的散斑图案,单目激光散斑投影系统需要借助精密的测距仪器,提前拍摄不同标准距离处的散斑图像,测量效率较低,且无法在线校正系统的光轴偏移。针对上述问题,提出一种基于单目激光散斑投影系统的外参数标定方法,可将单目激光散斑投影系统等效于带有散斑图像的双目立体视觉系统。通过调整标定板的位姿,计算同名散斑点的空间三维坐标,解算红外相机与激光散斑投射器之间的位姿关系,并对其进行迭代优化,生成投射器的虚拟散斑图像。实验结果表明,所提方法的位移测量误差低于0.16 mm,标准球的半径测量误差低于0.13 mm,且在一定的深度范围内,深度重建结果明显优于Astra-Pro的探测结果。所提方法可有效提高单目激光散斑投影系统的标定效率和深度重建精度。
机器视觉 单目激光散斑投影系统 外参数标定 迭代优化
1 塔里木大学植物科学学院, 新疆 阿拉尔 843300
2 中国农业大学土地资源管理学院, 北京 100083
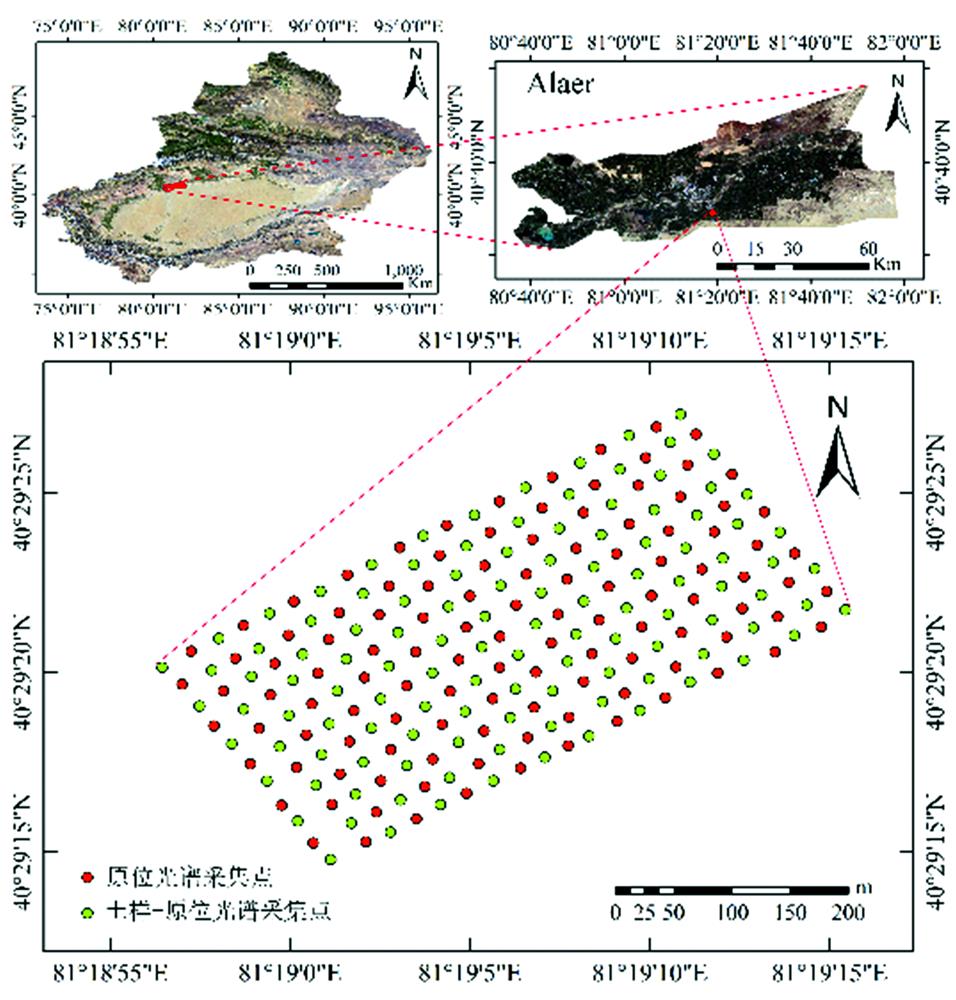
田间原位可见-近红外光谱(VIS-NIR)能够有效的提高土壤属性的检测效率, 但由于原位土壤中水分因素的影响, 土壤属性的预测精度很难达到预期。 如何有效去除土壤中的水分对土壤其他属性光谱预测的影响, 是利用田间原位光谱高精度预测土壤属性所面临的难题, 也是土壤光谱技术由室内转向田间的突破口。 该问题的有效解决, 可减除土壤样品的采集与室内预处理等过程, 实现土壤属性的田间原位光谱测定。 以新疆南部地区阿拉尔垦区十二团棉田为研究区, 采用网格采样法共采集了116个0~20 cm深度的表层土壤样品, 剔除1个异常值样品, 得到115个有用样品, 利用SR-3500型便携式地物光谱仪采集了231个样点的田间原位光谱数据, 土样经风干、 研磨和过筛等处理后测定其室内光谱和有机质含量。 利用Kennard-Stone算法将115个土样分为69个转换子集及46个预测集, 采用外部参数正交化法(EPO)、 光谱直接转换法(DS)及光谱间接转换法(PDS)三种去除水分算法结合原位光谱反射率(R)、 反射率一阶微分(R')、 反射率对数(LOG(R))以及反射率倒数(1/R)四种数学变换方式, 运用随机森林(RF)模型进行不同组合模型的构建及精度评价。 结果表明: (1)土壤有机质含量越高, 土壤光谱反射率越低。 土壤田间原位光谱反射率低于土壤室内光谱反射率; (2)室内光谱反射率与土壤有机质含量之间的相关性大于田间原位光谱, 室内光谱经一阶微分变换后与土壤有机质含量之间的相关性显著提升。 (3)土壤室内光谱反射率模型预测精度(R2=0.86, RPD=2.08, RMSE=1.55 g·kg-1, MAPE= 0.14)高于田间原位光谱反射率模型(R2=0.71, RPD=1.49, RMSE=2.17 g·kg-1, MAPE=0.20)。 在去除水分算法模型中, 以EPO一阶微分模型去除水分效果最好, 决定系数R2由0.71提高到0.83, RPD由1.49提高到2.04, RMSE由2.17 g·kg-1降低至1.58 g·kg-1, MAPE由0.20降低至0.14。 本研究实现了去除土壤水分因素的影响, 提高了田间原位光谱预测土壤有机质的精度, 为南疆棉田大尺度土壤有机质的预测及土壤肥力的评价提供了重要的参考。
土壤有机质 外参数正交化(EPO) 光谱直接转换法(DS) 光谱间接转换法(PDS) 随机森林(RF) Soil organic matter External parameter orthogonalization (EPO) Direct standardization (DS) Segmented direct standardization (PDS) Random forest (RF)
山东科技大学 测绘科学与工程学院, 山东 青岛 266590
提出了一种利用混合规则几何面进行车载移动测量系统(MMS)激光扫描仪外参数检校的方法。该方法利用现实环境中普遍存在的平面和圆柱面地物, 结合平面和柱面可公式化的几何特征对激光点进行严密的数学方程式约束, 通过非线性优化的方法精确求解激光扫描仪相对于MMS定位测姿POS系统的相对位置和姿态参数。实验结果表明: 相对于只采用平面地物约束进行检校的方法, 采用混合规则几何面联合约束检校的方法结果精度更高, 距离残差中误差达到了0.006 m; 同一车载平台、两套不同激光扫描仪系统检校后, 点云叠合效果较好。该检校方法具有精度高、简便、快速、实用等优点, 具有较强的工程应用价值。
车载移动测量系统 激光扫描仪 规则几何面 外参数检校 联合约束 MMS laser scanner regular geometric surface external parameters calibration joint constraint 红外与激光工程
2020, 49(2): 0205009
采用单像空间后方交会算法求解相机的外参数是摄影测量及机器视觉等领域的基本问题。在介绍前人研究成果的基础上,提出一种新的单像空间后方交会算法,即利用3个控制点建立临时坐标系,根据这些控制点在临时坐标系下的部分坐标分量为0的特点,将后方交会求解转换为三元二次方程组的求解,3个控制点的图像坐标数据可为非线性方程组的迭代求解提供初始值,使求解过程更加可靠。利用某商用工业摄影测量系统对实验空间中布设的控制场拍摄了120幅图像并计算其外参数,采用后方交会算法和角锥体算法分别对所取特征点计算外参数,结果表明:后方交会算法求解的参数正确,且迭代求解收敛性好,适用于任意旋转角的相机外参数求解。
机器视觉 摄影测量 后方交会算法 单像空间 外参数 共线条件方程 激光与光电子学进展
2020, 57(2): 021504
1 陆军工程大学石家庄校区车辆与电气工程系, 河北 石家庄 050003
2 北京特种车辆研究所, 北京 100071
针对车载三维激光雷达在工作前需要对安装外参数进行标定的问题, 综合考虑激光雷达的扫描光束不可见、多线式扫描等特点, 提出了一种激光雷达外参数的标定方法。首先对普通纸箱进行扫描, 以纸箱两个侧面和地面间的相互垂直关系作为约束, 采用随机抽样一致性算法(RANSAC)在获取的点云数据中拟合出三个平面的初始模型, 并通过旋转、平移步骤优化平面模型的拟合精度, 从最优模型中提取同名向量和同名点; 然后基于空间向量的三维坐标系转换模型, 对激光雷达的旋转和平移参数进行求解, 只需采集一次数据即可完成所有外参数的标定; 最后结合仿真和在标定后对室外环境三维重建的结果, 验证了算法的有效性。
三维激光雷达 外参数标定 RANSAC算法 同名向量 三维坐标系转换 3D LIDAR external parameters calibration RANSAC algorithm corresponding vector 3D coordinate conversion
中国人民解放军军事交通学院研究生管理大队, 天津 300161
针对无人车三维激光雷达与全球定位系统/惯性导航系统组合导航系统安装位置关系难以准确测量及相对转角无法直接测量的问题,提出一种基于多对点云同时匹配迭代生成外参数的方法。首先选择车辆直线往返行驶中位置相近、方向相反的激光雷达点云对进行匹配;然后设定参数区域中心、初始步长及步数,遍历参数组合,寻找目标函数最小时的外参数组合并更新为最优迭代区域中心;最后不断缩减步长,直到得到满足精度要求的最优外参数。实验采集了两段环境不同的数据,分别采用较优和较差的参数初始迭代中心以及不同步数进行标定。结果表明,所提方法用时短,对于非理想参数初值也能够得到较好的标定结果,而且标定方法简单,无需专门的标定物即可达到需求的标定精度。
遥感 三维激光雷达 点云匹配 区域迭代 外参数标定 激光与光电子学进展
2018, 55(2): 022803
四川大学电子信息学院光电系, 四川 成都 610064
提出了一种新的摄像机标定方法,用显示器显示不同方位和姿态标定图案,无需实际移动标靶来完成摄像机标定工作。先在显示器上显示一个标准标靶图像,用Tsai单平面摄像机标定方法标定得到摄像机的初始内外参数,再结合手工测量得到的外参中平移向量TT的ZZ向分量(Tz)初值,计算生成一系列不同位姿的虚拟标靶图案,显示在显示器上,替代常规标定方法中的标靶移动,最终采用张正友标定方法从摄像机拍摄到的多位姿平面标靶图案中标定得到最终的摄像机内外参数。实验分析验证了新方法的实用性,结果表明,新方法易操作、不需要实际移动平面标靶,标定精度与基于多位姿平面标靶的张正友方法相当,能为摄像机标定提供新的实现方案。
摄像机标定 二维平面标靶 虚拟移动 虚拟标靶 摄像机外参数 camera calibration 2D coplanar targets virtual movement virtual targets camera extrinsic parameters
无人车三维激光雷达与GPS/INS组合导航系统融合使用,需要对两者之间的相对位姿进行标定。针对车辆运动过程点云畸变的现象,提出了一种单帧点云中激光扫描点坐标修正方法。针对标定问题,建立了标定模型,提出了一种基于ICP算法和手眼标定模型及最小二乘法进行外参数标定的方法。通过蒙特卡罗仿真实验,对该方法的有效性和精度进行了仿真和验证。在实验室JJUV-6无人车平台上进行标定试验,得到两者之间的三维位姿关系。对比标定前后三维点云重建效果,点云重叠度接近于配准效果。基于应用的目的,基本满足二维地图构建和三维环境重建的需求。
无人车 三维激光雷达 点云配准 手眼模型 外参数标定 unmanned vehicle three-dimensional lidars point cloud registration hand-eye model extrinsic pa-rameters calibration
为了满足大型自由曲面工件高精度实时三维测量的需求, 设计了一种超大尺度线结构光传感器三维测量系统, 并提出一种基于一维靶标的传感器外参数的现场标定方法。实验结果表明, 该方法的标定精度与基于平面靶标的方法相当, 且其一维靶标的高精度制作更容易, 外参数的现场标定过程操作更方便, 更适合超大尺度线结构光传感器的现场标定。
测量 超大尺度线结构光 外参数现场标定 一维靶标 消隐点 中国激光
2017, 44(10): 1004003
1 国防科学技术大学航天科学与工程学院, 湖南 长沙 410073
2 图像测量与视觉导航湖南省重点实验室, 湖南 长沙 410073
在多相机组合测量应用场景中, 各相机之间常常存在没有重叠视场的特殊情况, 该条件下多相机组安装关系的标定极具挑战性。针对传统基于全站仪的标定方法过于繁琐的缺点, 基于机器人领域里手眼标定与多相机组安装关系标定的等价关系, 给出了求解多相机组安装关系的基础方程, 推导了利用四元数描述旋转矩阵下基础方程的解算步骤, 提出了一种基于手眼标定的无重叠视场多相机组标定方法。实验结果表明, 与传统标定方法相比, 该方法在不降低测量精度的前提下, 无需其他测量传感器的辅助, 极大减少了人工作业量, 操作更加简单灵活, 工作效率更高。
测量 外参数标定 手眼标定 无重叠视场









